2. Campbellův diagram
Definice
Obecně je to závislost vlastních frekvencí na parametru. V rotorových soustavách jsou tímto parametrem otáčky hřídele.
Úvod
![]()
![]() - systém je nestabilní
- systém je nestabilní
![]() - systém je
stabilní
- systém je
stabilní
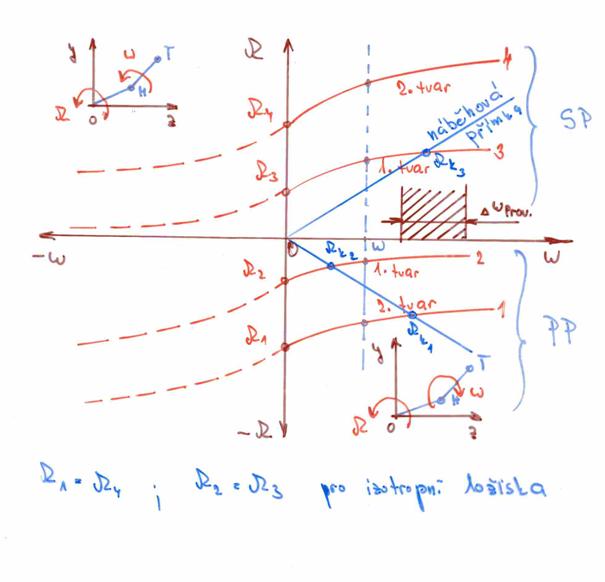
Campbellův diagram –
závislost ![]() na
úhlové
rychlosti
rotace hřídele
na
úhlové
rychlosti
rotace hřídele ![]()
Tři případy
1. Bez gyroskopických účinků a symetrické uložení hřídele
2. S gyroskopickými účinky a symetrickým uložením hřídele
3. S gyroskopickými účinky a nesymetrickým uložením hřídele
Zobrazení Campbellových diagramů

Absolute system
Tlumení v rotorových soustavách
Pohybová rovnice

Modely tlumení
· Vnější
· Materiálové viskozní
· Materiálové hysterezní
Hysterezní materiálové tlumení
Model
Viskozní materiálové tlumení
Model
Proporcionální tlumení
![]()
![]()
Experimentální stanovení koeficientů proporcionálního tlumení
![]()
![]() - hlavní (modální)
tlumení
- hlavní (modální)
tlumení
![]() - hlavní (modální)
hmotnost
- hlavní (modální)
hmotnost
![]() - hlavní (modální)
tuhost
- hlavní (modální)
tuhost
![]()
![]()
Tři případy stanovení koeficientů proporcionálního tlumení:
· zná se pouze frekvence a tlumení jednoho tvaru
 (druhá rovnice)
(druhá rovnice)
· znají se frekvence a tlumení u dvou tvarů
(dvě rovnice)
· znají se frekvence a tlumení u více tvarů
(přeurčená soustava
rovnic)
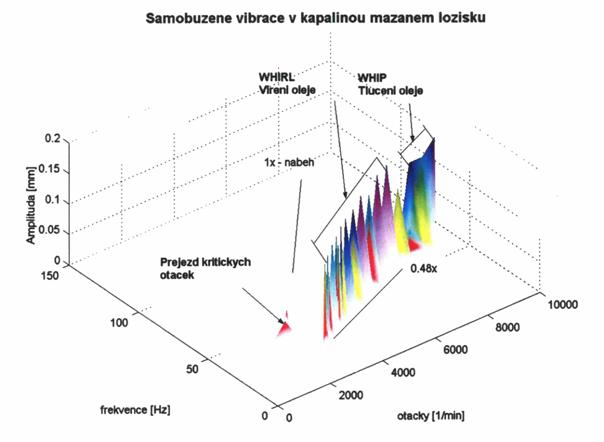
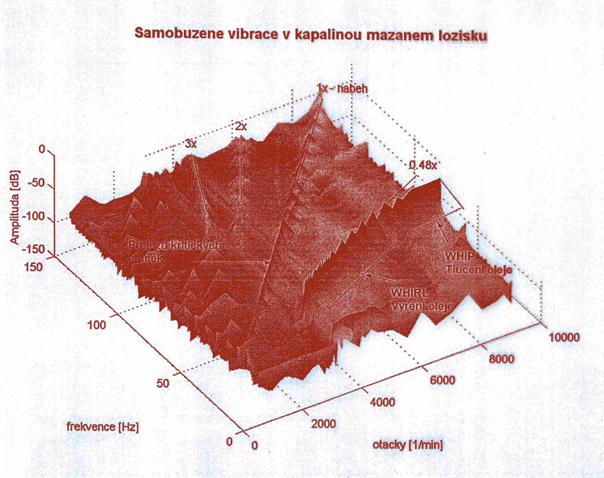
Kaskádový diagram
Stabilita pohybu
Stabilitu lze definovat z různých hledisek
· dynamická stabilita
· globální stabilita
· lokální stabilita
· stabilita struktury
· stabilita tvaru
· stabilita ve smyslu Lagrange
· stabilita ve velkém
· stabilita ve smyslu Ljapunova
· technická stabilita
Kritéria posouzení stability
· Na základě reálné části komplexní ho vlastního čísla
· Routhovo – Hurwitzovo kritérium
· Analýza ve fázové rovině
· Ljapunovy exponenty
· Floquetovo kritérium
· Analýza v Gausové rovině
Vlastní číslo ![]() -
(stabilita typu divergence, nebo flutter)
-
(stabilita typu divergence, nebo flutter)
Routhovo - Hurwitzovo kritérium
Ve staticky rovnovážné poloze je rychlost pohybu nulová. Jestliže na soustavu nepůsobí vnější síly, které nemají potenciál, staticky rovnovážná poloha se stanoví (na základě Lagrangeových rovnic II. druhu) z rovnice
![]()
Jednou z možností o rozhodnutí stabilní, či nestabilní rovnovážné polohy je druhá derivace, tedy pro stabilní rovnovážnou polohu misí být
![]()
O tom zda bude staticky rovnovážná poloha stabilní, nebo labilní lze rozhodnout např. na základě Routhova – Hurwitzova kritéria. Nejdříve je nutno sestavit tzv. charakteristickou rovnici
![]()
Nutnou a postačující podmínkou pro to, aby charakteristická rovnice měla všechny kořeny se zápornou reálnou částí je splnění nerovností:
1. ![]()
2.  ,
,  ,
, 
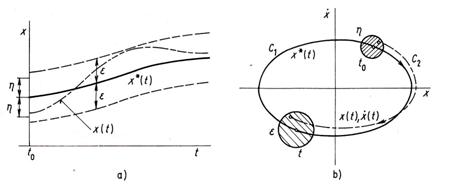
Ljapunova definice stability v tzv. „malém“
Nerozrušený pohyb je
stabilní, jestliže pro každé kladné malé číslo ![]() lze nalézt
takové kladné číslo
lze nalézt
takové kladné číslo ![]() , že pro všechny rušivé pohyby pro
které platí
, že pro všechny rušivé pohyby pro
které platí ![]() bude
pro všechna
bude
pro všechna ![]()
![]() . Jestliže
takové
. Jestliže
takové ![]() neexistuje,
pohyb je nestabilní.
neexistuje,
pohyb je nestabilní.
Fázová rovina (Hayashiho)
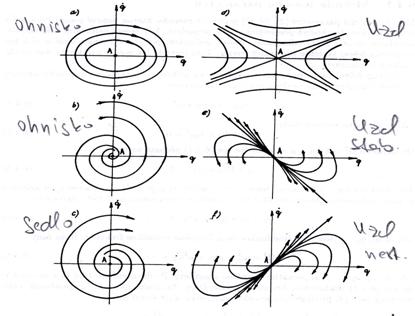
Jestliže se pohyb zastupujícího bodu blíží k ohnisku, dynamický systém je stabilní a pokud se vzdaluje, dynamický systém je nestabilní.
Ljapunovy exponenty
Exponenty polynomu rozhodují o stabilitě dynamického systému. Jejich výpočet je značně časově náročný a provádí se v časové oblasti.
Fluqetovo kritérium (Floquetova věta)
Floquetova teorie se vztahuje k soustavě lineárních obyčejných diferenciálních rovnic prvního řádu
![]()
kde matice A je spojitá periodická funkce s periodou T. Matice F se nazývá maticí fundamentálních řešení, přičemž sloupce jsou lineárně závislými řešeními. Pak lze řešení soustavy rovnic napsat ve tvaru
![]()
Matice
![]()
se nazývá přenosová, nebo
také přechodová matice z času ![]() do času
do času ![]() . Není-li matice
. Není-li matice ![]() funkcí času
(konstantní), pak je matice přenosu dána vztahem
funkcí času
(konstantní), pak je matice přenosu dána vztahem
![]()
což je tzv. maticová
exponenciála. Je-li matice ![]() funkcí času, pak je matice přenosu
dána vztahem
funkcí času, pak je matice přenosu
dána vztahem
![]()
Mezi časy 0 a T (perioda) pak je
![]()
nebo
![]()
(kdy je ![]() ). Matice
). Matice ![]() se nazývá
matice monodromie. Matice
se nazývá
matice monodromie. Matice ![]() je dle Floquetovy věty regulární a
rovnice
je dle Floquetovy věty regulární a
rovnice ![]() představuje
podobnostní transformaci (nemění se vlastní
čísla matice před transformací a po ní). Pak
vlastní
čísla matice
představuje
podobnostní transformaci (nemění se vlastní
čísla matice před transformací a po ní). Pak
vlastní
čísla matice ![]() a matice
a matice ![]() jsou stejné.
Pak stačí, posuzovat stabilitu pouze podle
matice přenosu
jsou stejné.
Pak stačí, posuzovat stabilitu pouze podle
matice přenosu ![]() . Nutnou a postačující podmínkou
pro to, aby dynamický
systém
byl stabilní je, aby velikost všech
vlastních
čísel mezi
časy 0 a T ležela v rozsahu 0-1.
. Nutnou a postačující podmínkou
pro to, aby dynamický
systém
byl stabilní je, aby velikost všech
vlastních
čísel mezi
časy 0 a T ležela v rozsahu 0-1.
Stanovení matice ![]() (4 přístupy)
(4 přístupy)
Homogenní tvar pohybových rovnic ve stavovém prostoru má tvar (pro zjednodušení zápisu je vynechán horní pruh)
![]()
tento lze upravit na tvar
![]()
nebo také
![]()
Matici přenosu je nejvýhodnější počítat numericky.
1. Přístup
Je-li časový úsek ![]() rozdělen na n
časových kroků, pak
rozdělen na n
časových kroků, pak
![]()
tedy přes maticovou exponenciálu
2. Přístup
Je-li časový úsek ![]() rozdělen na n
časových kroků. Je-li časový krok integrace malý, lze během tohoto kroku
považovat matici A za konstantní a platí
rozdělen na n
časových kroků. Je-li časový krok integrace malý, lze během tohoto kroku
považovat matici A za konstantní a platí
![]()
Při použití explicitní metody je
![]()
odtud
![]()
a matice přenosu mezi sousedními kroky výpočtu
![]()
![]()
3. Přístup
Je-li časový úsek ![]() rozdělen na n
časových kroků. Je-li časový krok integrace malý, lze během tohoto kroku
považovat matici A za konstantní a platí
rozdělen na n
časových kroků. Je-li časový krok integrace malý, lze během tohoto kroku
považovat matici A za konstantní a platí
![]()
Při použití implicitní metody je
![]()
odtud
![]()
a matice přenosu mezi sousedními kroky výpočtu
![]()
![]()
4. Přístup
Přímým výpočtem odezvy v čase T na základě zvolených počátečních podmínek. V podstatě se provádí opakovaně výpočet odezvy v čase T na základě zvolených počátečních podmínek. Tento výpočet se opakuje n krát.
![]()
K výpočtu odezvy v čase T lze využít některou z přímých metod integrace pohybových rovnic.
Poznámka: V případě použití metod přímé integrace pohybových rovnic lze rovněž využít Newmarkovu metodou, případně Runge – Kutha 4. řádu. Explicitní, nebo implicitní metoda zde byla ukázána pouze pro názornost
Analýza v Gausové rovině
Používá se při řešení vynuceného ustáleného kmitání. Pokud je pohyb zastupujícího bodu v Gausové rovině ve smyslu hodinových ručiček, dynamický systém je stabilní a naopak.