13. Dynamika rotorových soustav s nesymetrickými rotujícími i
nerotujícími částmi
Nesymetrie v rotorových soustavách může být v geometrických, nebo fyzikálních parametrech, přičemž nesymetrie geometrie se vždy v konečném důsledku projeví v nesymetrii ve fyzikálních parametrech. Tyto parametry jsou hmotnost, tlumení a tuhost. Z pohledu syntézy hřídelové vazebné části může být nesymetrie buď v rotující nebo nerotující části. Častější jsou případy nesymetrické nerotující části, kdy zejména ložiska, nebo např. hydrodynamické tlumiče mají ve dvou na sobě kolmých směrech kmitání v rovině kolmé na osu rotace rozdílnou tuhost a tlumení. S ohledem na další softwarové zpracování není do soustavy zahrnuta poddajnost statorové části.
Rotorová soustava s nesymetrií nemusí být vždy nelineární a v konečném důsledku se např. nesymetrie v rotující části může projevit periodickou změnou prvků matic v pohybové rovnici. Např. při kmitání hřídele s obdélníkovým průřezem se periodicky mění matice tuhosti během každé otáčky.
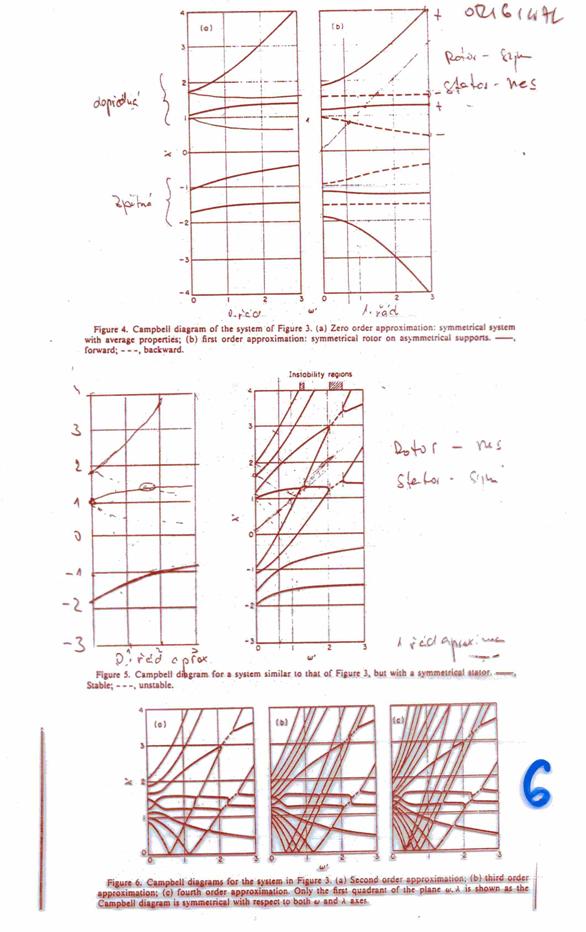
Dynamické chování nesymetrických rotorových soustav ve srovnání se symetrickými se projevuje větším počtem vlastních čísel a z toho plynoucími komplikovanými Campbellovými diagramy, buzením subharmonických, nebo ultraharmonických otáčkových složek a v neposlední řadě častou ztrátou stability.
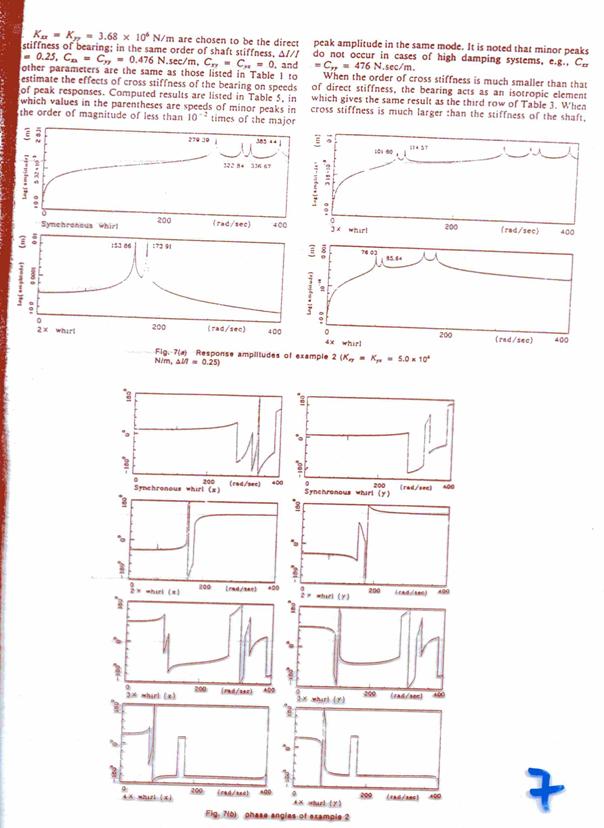
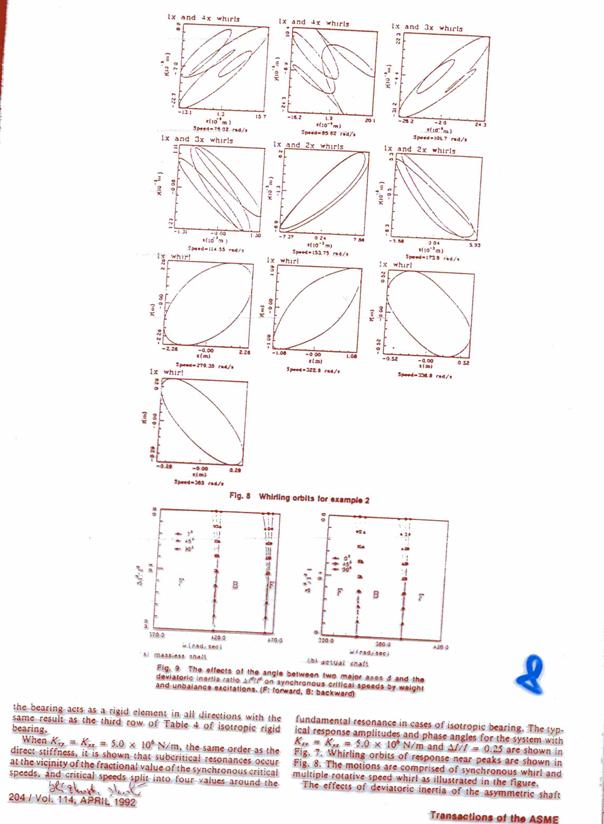
Problematice výpočtového modelování rotorových soustav s různou nesymetrií je věnována poměrně malá pozornost a výsledky experimentálního výzkumu se v literatuře téměř nevyskytují. První práce zabývající se problematikou dynamiky rotorů s nestejnou tuhostí je např. [89] nebo [90], a dále z novějších literárních pramenů např. [65], kde jsou uvedeny některé výsledky řešení modelové úlohy se 4o volnosti. Zde je rovněž upozorněno na vznik anomálií při křížení křivek vlastních frekvencí s náběhovou přímkou, nebo při křížení dvou tvarů kmitu. Modální analýzou, včetně Campbellovými diagramy se zabývají články [62], [63] nebo např. [64]. Na velmi jednoduchých modelových úlohách jsou ukázány možné tvary Campbellových diagramů při různých kombinacích nesymetrií. Tyto závěry byly potvrzeny výpočtovým modelováním pomocí programového systému RS, přičemž některé jsou zde uvedeny. Autoři ve všech citovaných publikacích konstatují, že v oblasti křížení vzniká pásmo nestabilního kmitání. Poměrně přehledně a detailně je v [66] řešena problematika vynuceného ustáleného kmitání vycházející z aplikace MKP. Závěry, které jsou zde uváděny, včetně orbitální trajektorie středu hřídele byly potvrzeny, i když v některých případech bylo dosaženo poněkud odlišných výsledků.
Výpočtové modelování dynamických vlastností vyžaduje speciální software pro analýzu. Autorem byl vytvořen software s názvem RS (viz [25]), kterým lze řešit problém vlastních hodnot při daných otáčkách, analyzovat závislost vlastních čísel na otáčkách a řešit odezvu při vynuceném ustáleném kmitání při buzení vlastní nevývahou. Přístup k řešení byl publikován v [67], a dále některé výsledky řešení modelových úloh jsou uvedeny v [16].
1 Teoretická analýza
Pohybové rovnice lze obecně sestavit v pevném, nebo spolurotujícím souřadnicovém systému. Jestliže označíme indexem „1“ pevný ss a indexem „2“ spolurotující, v pevném ss lze psát pohybovou rovnici
![]() (1)
(1)
Např. nesymetrická matice tuhosti rotující části bude v pevném ss periodicky proměnná, zatímco ve spolurotujícím nebude periodicky proměnná. Na druhou stranu nesymetrická matice tuhosti vazeb nebude v pevném ss periodicky proměnná, ale ve spolurotujících souřadnicích periodicky proměnná bude. V dalším bude ukázáno sestavení pohybových rovnic v obou systémech.
Pro další analýzu je vhodné v rovnici (1) rozdělit koeficientové matice hmotnosti, tlumení a tuhosti na část připadající hřídelové (rotující) části a část nerotující. Jestliže označíme rotující část „R“ a nerotující, zahrnující vazebné elementy „V“, lze přepsat rovnici (1) do tvaru
![]() (2)
(2)
Sestavení pohybové rovnice ve spolurotujících souřadnicích
Zobecněné souřadnice zahrnující posuvy i natočení jednoho uzlu lze ze spolurotujících do pevných souřadnic převést na základě transformačního vztahu
 (3)
(3)
kde ![]() je úhel pootočení spolurotujícího
ss ve vztahu k pevnému. Tento vztah lze zkráceně přepsat do tvaru
je úhel pootočení spolurotujícího
ss ve vztahu k pevnému. Tento vztah lze zkráceně přepsat do tvaru
![]() (4)
(4)
Matice ![]() je blokově diagonální,
přičemž submatice na diagonále mají tvar podle rovnice (3). Derivacemi rovnice (4)
podle času se dále obdrží
je blokově diagonální,
přičemž submatice na diagonále mají tvar podle rovnice (3). Derivacemi rovnice (4)
podle času se dále obdrží
![]() (5)
(5)
kde ![]() je blokově diagonální matice se
submaticemi, které mají tvar
je blokově diagonální matice se
submaticemi, které mají tvar
 (6)
(6)
Po dosazení (4) a (5) do (2) se pro řešení odezvy ve spolurotujících souřadnicích obdrží
 (7)
(7)
Násobením této rovnice zleva
maticí ![]() (
(![]() ) se po úpravě
obdrží
) se po úpravě
obdrží
 (8)
(8)
kde
 . (8a)
. (8a)
Struktura této rovnice, kde někdy
jsou koeficientové matice v ss 1 a někdy v ss 2 je v souladu
s vhodností zadávání vstupních dat do výpočtu. Nesymetrickou rotační část
je vhodné zadávat ve spolurotujících souřadnicích a nerotující na druhé straně
v pevném ss. Pro matice ![]() pak platí
pak platí
 (9)
(9)
kde ![]() je blokově diagonální maticový
operátor, jehož submatice mají tvar, který je zřejmý ze vztahu (6).
je blokově diagonální maticový
operátor, jehož submatice mají tvar, který je zřejmý ze vztahu (6).
Za účelem
dalšího softwarového zpracování je vhodné dále upravit matice
hmotnosti, tlumení nebo
tuhosti nerotující statorové části. Vzhledem
k tomu, že pro všechny je úprava podobná, bude v dalším ukázána pouze
pro matici tuhosti jednoho prvku. Rozdělíme tedy
matice na dvě části, přičemž první obsahuje tzv. střední, konstantní hodnoty a
druhá perturbační, proměnné členy. Pro libovolnou submatici „![]() “ řádu 2x2
lokální matice v ss 1 je
“ řádu 2x2
lokální matice v ss 1 je
 (10)
(10)
kde
 (11)
(11)
Pro každý konečný prvek lze lokální matice hmotnosti, tlumení a tuhosti zapsat ve tvaru součtu středních a perturbačních složek. Globální matice pak jsou dány rovněž součtem středních a perturbačních částí a mají tvar
 (12)
(12)
Transformace globálních matic nerotujících částí (vazeb) z pevného do spolurotujícího ss se provede na základě následujících vztahů (opět pouze pro matici tuhosti)
![]() (13)
(13)
která má dále po roznásobení tvar
![]() (14)
(14)
kde tři globální matice pravé
strany rovnice mají submatice „![]() “ řádu 2x2 příslušející posuvům,
nebo natočením ve tvaru
“ řádu 2x2 příslušející posuvům,
nebo natočením ve tvaru
 (15)
(15)
Podobným způsobem lze upravit i matice tlumení a hmotnosti. Pohybová rovnice (8) po dosazení (14) pak má tvar

(16)
kde pro jednotlivé matice je
 (17)
(17)
nebo v komplexním oboru s využitím Eulerových vztahů
 (18)
(18)
kde horní index C značí komplexní matice. Např. pro matice tuhosti je
![]()
 (19)
(19)
Ve stavovém prostoru má pohybová rovnice tvar
 (20)
(20)
nebo v komplexním oboru )
![]() (21)
(21)
Dva horní pruhy značí rozšířené matice. Např. část vektoru výchylek a odpovídající první rozšířené matice hmotnosti a tuhosti jsou
 (22)
(22)
Sestavení pohybových rovnic v pevných souřadnicích
Výchozí rovnicí je opět jako v předchozím případě rovnice (2). Jak již bylo uvedeno, s ohledem na softwarové zpracování je vhodné nesymetrickou rotující část zadávat ve spolurotujících souřadnicích a nerotující v pevných. Použitím transformačních vztahů má pohybová rovnice (2) tvar
![]() (23)
(23)
Transformační matice nají stejnou strukturu jako v předchozím případě. V dalším se zaměřme na úpravu částí připadajících rotující části. Např. pro matici tuhosti po roznásobení transformačními maticemi je
![]() (24)
(24)
kde tři globální matice pravé
strany rovnice mají submatice „![]() “ řádu 2x2 příslušející posuvům,
nebo natočením ve tvar
“ řádu 2x2 příslušející posuvům,
nebo natočením ve tvar
 (25)
(25)
Podobným způsobem lze upravit i matice hmotnosti a tlumení. Pohybovou rovnici (23) pak lze zapsat ve tvaru
 (26)
(26)
nebo v komplexním oboru
 (27)
(27)
kde pro sestavení komplexních matic hmotnosti, tlumení a tuhosti platí stejný předpis jako v předchozím případě, tedy rov. (19). Pro koeficientové matice v rov. (26) platí vztahy
 (28)
(28)
Ve stavovém prostoru má pohybová rovnice tvar
![]()
(29)
nebo v komplexním oboru
![]() (30)
(30)
Dva horní pruhy značí rozšířené matice, které lze sestavit na základě rov. (22).
Poznámka
Struktura pohybových rovnic ve spolurotujících, nebo pevných souřadnicích je stejná. V obou případech je parametrická. V pevných souřadnicích je nutno transformovat rotorovou část a statorovou ne, zatímco ve spolurotujících je tomu naopak.
V případě spolurotující souřadnic je nutno ve smyslu rov. (17) sestavit větší počet matic, přičemž na druhou stranu zpravidla bývá počet prvků s vazbami podstatně menší, než počet prvků rotující části. Sestavení globálních matic v pevných souřadnicích je ve srovnání se spolurotujícími souřadnicemi jednodušší, avšak je nutno transformovat každý konečný prvek.
Z pohledu softwarového zpracování co nejjednoduššího algoritmu bylo vybráno řešení v pevných souřadnicích. Autorem byl vytvořen programový systém RS, pomocí kterého lze řešit problém vlastních hodnot a odezvy při vynuceném ustáleném kmitání.
2 Řešení problému vlastních hodnot
Vzhledem k tomu, že výsledný tvar pohybových rovnic ve spolurotujících i pevných souřadnicích je stejný, uvedený přístup lze aplikovat pro oba případy. Proto v dalším zápisu budou vynechány dolní indexy „1“, nebo „2“, kterými se odlišovaly souřadnice.
S ohledem na parametrickou pohybovou rovnici (21), nebo (30) předpokládejme řešení ve tvaru Fourierovy řady
 (31)
(31)
kde ![]() je řád aproximace. Pro další
analýzu uvažujme řád aproximace 2. Po provedení příslušných derivací a
dosazením do rovnice (18), na základě porovnání členů u stejných mocnin se
obdrží rovnice
je řád aproximace. Pro další
analýzu uvažujme řád aproximace 2. Po provedení příslušných derivací a
dosazením do rovnice (18), na základě porovnání členů u stejných mocnin se
obdrží rovnice
(32)
kde ![]() je maticový operátor dynamické
tuhosti ve stavovém prostoru, který má tvar
je maticový operátor dynamické
tuhosti ve stavovém prostoru, který má tvar
![]() (33)
(33)
Koeficientové matice tuhosti nebo hmotnosti mohou být reálné, nebo komplexní. Dále je
![]() (34)
(34)
Výsledné
matice hmotnosti nebo tuhosti
v rov. (32) jsou pásové a nesymetrické. Ze struktury je rovněž velmi dobře
zřejmá algoritmizovatelnost pro případ uvažování vyšších řádů aproximace.
Zjednodušeně řečeno, při přidání dalšího řádu (předpokládejme ![]() - tý) se levá
horní část matice hmotnosti upraví přidáním
řádku, přičemž je nutno současně upravit druhý řádek. Přidání a úprava je
zřejmá z následujícího vztahu
- tý) se levá
horní část matice hmotnosti upraví přidáním
řádku, přičemž je nutno současně upravit druhý řádek. Přidání a úprava je
zřejmá z následujícího vztahu
 (35)
(35)
Obdobným způsobem je nutno upravit pravou dolní část přidáním řádku a současně upravit předposlední řádek dle vztahu
 (36)
(36)
Levá horní část matice tuhosti se rovněž upraví přidáním jednoho řádku při současné úpravě druhého dle vztahu
 (37)
(37)
a pravá dolní část matice opět přidáním jednoho řádku při současné úpravě předposledního dle vztahu
 (38)
(38)
V případě dynamické alokace polí lze řád výsledných matic měnit podle požadovaného řádu aproximace, přičemž tato alokace je z pohledu algoritmizace úlohy a softwarového zpracování velmi snadná.
Za předpokladu
nultého řádu aproximace jsou do řešení zahrnuty pouze střední části bez
perturbačních složek, tedy jako by byla rotorová soustava symetrická
s maticemi hmotnosti a
tuhosti ![]() .
.
3 Řešení odezvy při vynuceném ustáleném kmitání
Stejně jako v případě řešení problému vlastních hodnot budou i zde vynechány symboly „1“ a „2“, kterými jsou označeny pevné a spolurotující souřadnice. Dynamické vlastnosti nesymetrických rotorových soustav jsou do značné míry závislé i na statickém zatížení, které u symetrických nejsou tak výrazné a projevují se pouze statickým průhybem.
V případě nesymetrických rotorových soustav lze řešení provést v reálném, nebo komplexním oboru. S ohledem na úspornost zápisu bude řešení ukázáno v komplexním oboru, přičemž do řešení bude zahrnuto i statické zatížení, např. vlastní tíhou, předpokládané tedy ve tvaru
![]() (39)
(39)
S ohledem na tvar buzení a parametrickou pohybovou rovnici lze řešení předpokládat ve tvaru
![]() (40)
(40)
Např. pro řád
aproximace 3 ![]() ,
po provedení derivace, dosazení do pohybové rovnice (27), nebo (18), se po
porovnání členů u stejných mocnin obdrží soustava algebraických rovnic
v komplexním oboru ve tvaru
,
po provedení derivace, dosazení do pohybové rovnice (27), nebo (18), se po
porovnání členů u stejných mocnin obdrží soustava algebraických rovnic
v komplexním oboru ve tvaru
 (41)
(41)
kde ![]() je maticový operátor dynamické
tuhosti který má tvar
je maticový operátor dynamické
tuhosti který má tvar
![]() (42)
(42)
Koeficientové matice
hmotnosti, tuhosti,
nebo tlumení mohou být reálné, nebo komplexní.
Matice soustavy v rov. (41), i když to z této rovnice není tak
zřejmé, má opět pásovou strukturu a z pohledu softwarového zpracování je
její sestavení velmi dobře algoritmizovatelné. Obecně přidáním dalšího řádu
aproximace se přidá jeden řádek při současné úpravě předchozích dvou. Pak mají
poslední tři řádky matice soustavy pro ![]() -tý řád aproximace tvar
-tý řád aproximace tvar
 (43)
(43)
Řešením soustavy rovnic (41) se získají amplitudy jednotlivých násobků otáčkové frekvence. Např. pro statické zatížení a uvažování prvního řádu aproximace dle rovnice
 (44)
(44)
odkud je zřejmé, že do řešení jsou zahrnuty pouze „střední“ hodnoty a statická i dynamická výchylka nejsou na sobě závislé. Koeficientové matice hmotnosti, tuhosti i tlumení pro tento řád aproximace reálné.
Poznámky
· Pořadí neznámých posuvů a natočení v daném uzlu ve vztahu k celkovém vektoru neznámých bylo voleno u obou řešených úloh z ohledem na možnost algoritmizace při sestavování příslušných matic pro libovolnou volbu řádu aproximace.
· Při rozsáhlejších úlohách a volbě vyššího řádu aproximace jsou výsledné matice značného řádu, což činí potíže při výpočtu. Proto je vhodné v těchto případech užít redukce. V programovém systému RS je k redukci použita Guyanova metoda.
Literatrura
[1] Nelson, H., D., McVaugh, J., M.: The Dynamics of Rotor-Bearing Systems Using Finite Elements. Journal of Engineering for Industry, Transactions of the ASME, May 1976.
[2] Zorzi, E., S., Nelson, H., D.: Finite Element Simulation of Rotor-Bearing System with Internal damping. Journal of Engineering for Power, Transactions of the ASME, January 1997.
[3] Krämer, E.: Dynamics of Rotors and Foundations. Springer Verlag Berlin, 1993.
[4] Slavík, J., Stejskal, V., Zeman, V.: Základy dynamiky strojů, ČVUT Praha, 1997.
[5] Malenovský, E., Ondrůšek, Č., Zapoměl, J., Veselka, F., Král, P.: Vybrané problémy analýzy dynamických vlastností rotorových soustav s elektromechanickými vazbami. Průběžná zpráva úkolu GAČR č. 101/96/0781, Brno 1996.
[6] Tondl, A.: Some Problems of Rotor Dynamics. Publishing House of the Czechoslovak Academy of Sciences, Prague 1965.
[7] Malenovský, E., Zapoměl, J., Ondrůšek, Č., Veselka, F.: Výpočtové modelování dynamických vlastností nelineárních rotorových soustav. Závěrečná zpráva úkolu GAČR č. 101/96/0781, Brno 1998.
[8] Malenovský, E., Kamenický, J.: Teoreticko experimentální analýza vázaného kmitání souosých rotorových soustav. Výzkumná zpráva VUT FS - VA Brno, 1995.
[9] Malenovský, E., Kamenický, J.: Výpočtové modelování vibrací dvourotorového leteckého motoru AI - 25 s uvážením poddajnosti skříně. Výzkumná zpráva VUT FS - VA Brno, 1995.
[10] Kamenický, J. Malenovský, E.: Dynamické vlastnosti nelineární vázané soustavy motoru AI-25. Výzkumná zpráva VA Brno, Brno 1998.
[11] Fadějev, D., K., Fadějevová, V., N.: Numerické metody lineární algebry. SNTL Praha 1964.
[12] Kozánek, J., Piranda, J.: Identifikační vyhodnocení amplitudo-frekvenční charakteristiky. Kolokvium „Dynamika strojů ‘96“, Praha, Ústav termomechaniky, 1996.
[13] Bittnar, Z., Šejnoha, J.: Numerické metody v mechanice 1. a 2. Díl. ČVUT Praha, 1992.
[14] Chen, Y., Xue, H.: Dynamic Large Deflection Analysis of Structures by a Combined Finite Element-Riccati Transfer Matrix Method on a Microcomputer. Computers & Structures, Vol. 39, No. 6, pp. 699-703, 1991.
[15] Zapoměl, J.: Přístup k zahrnutí materiálového tlumení do výpočtového modelování mechanických systémů. Habilitační práce, Ostrava 1998.
[16] Malenovský, E., Zapoměl, J.: Vybrané problémy výpočetního modelování v úlohách dynamiky nelineárních rotorových soustav. Závěrečná zpráva grantového úkolu GAČR č. 101/93/0297, VUT FS Brno 1995.
[17] Childs, D., W: Dynamic Analysis of Turbulent Annular Seals Based on Hirs’ Lubrication Equation. Journal of Lubrication Technology, July 1983, Vol. 105, pp. 429-436.
[18] Childs, D., W.: Convergent-Tapered annular seals: analysis and testing for rotordynamic coefficients, Journal of tribology, July 1985, Vol 107.
[19] Amoser, M.: Scale effects on rotordynamic coefficients in seals. A contribution on the 6 th international meeting IAHR WG1, 1993 Lausanne, Switzerland.
[20] Amoser M.: Strömungsfelder und Radialkräfte in Labyrinthdichtungen hydraulischer Strömungsmaschinen, Diss. ETH Nr.11150, Zürich, 1995.
[21] Zapoměl, J.: Popis programového systému FEDYNA. TU-VŠB fakulta strojní, Ostrava, 1988.
[22] Malenovský, E., Zapoměl, J.: Programový systém FEDYNA. Uživatelský manuál VUT FSI v Brně, Brno, 1997.
[23] Malenovský, E.: Dynamika rotorových soustav. Habilitační práce VUT FSI v Brně. Brno 1993.
[24] Malenovský, E.: Programové systémy NRS, R1 a R2. Uživatelský manuál VUT FSI v Brně, Brno, 1998.
[25] Malenovský, E.: Programový systém RS. Uživatelský manuál VUT FSI v Brně. Brno, 1997.
[26] Malenovský, E., Koutník, J., Zapoměl, J., Pochylý, F.: Dynamické vlastnosti rotorové soustavy napájecího čerpadla CND 6-150-13. Výzkumná zpráva VUT FSI v Brně. Brno 1997.
[27] El-Shafei, A.: Unbalance Response of a Jeffcott Rotor Incorporating Long Squeeze Film Dampers. Transactions of the Vibration and Acoustics, January 1991, Vol 113, pp 85-94.
[28] El-Shafei, A., R., Eranki, V.: Dynamic Force Coefficients of Short and Long Squeeze Film Dampers Executing Elliptic Orbits. C432/127 IMechE 1992, pp. 597-604. Conference „State of the Art in Numerical Analysis“, University of York, UK, 1996.
[29] Malenovský E., Kamenický J., Zapoměl J.: Příspěvek k dynamice koaxiálních rotorových soustav. Konference Inženýrská mechanika ‘96, Svratka 1996, 149-154.
[30] Pochylý, F., Koutník, J.: The Approximate Solution of Partial Differential Equations by Means of Bézier Surfaces. Engineering Mechanics, Vol. 1. 1994, No. 3 pp. 165-176.
[31] Pochylý, F., Stránský, L.: Metoda velkých kontrolních objemů na principu Bézierova tělesa - I. Diskretizace oblasti pomocí Bézierových entit. Engineering Mechanics,Vol. 6, 1999, č. 2 str. 131-142.
[32] Brepta, R., Půst, L., Turek, F.: Mechanické kmitání. Technický průvodce. Sobotáles, Praha 1994.
[33] Vitásek, E.: Numerické metody. Technický průvodce, SNTL Praha 1987.
[34] Enenkl, V., Ramík, Z.: Sdílení tepla IA. Učební texty VUT v Brně, strojní fakulta. SNTL Praha 1974.
[35] Sazima, M., Kmoníček, V., Schneller, J.: Teplo. Technický průvodce 2. SNTL Praha 1989.
[36] Vance, J., M.: Rotordynamics of Turbomachinery. Wiley, New York, 1988.
[37] El-Shafei, A., Crandall S., H.: Fluid Inertia Forces in Squeeze Film Dampers. Rotating Machinery and Vehicle Dynamics. DE-Vol 36, 1991, pp 229 - 29.
[38] Pochylý, F., Malenovský, F., Hlavoň, P.: Hydrodynamický tlumič. Národní konference s mezinárodní účastí Inženýrská mechanika ‘99, Svratka 1999, str. 199-202.
[39] Pochylý, F, Malenovský, E., Hlavoň, P.: The nonstationary Motion of the Rigid Body in Real Liquid. 3rd International Conference Engineering Aero-Hydroelasticity, Prague, 1999, pp. 346-351.
[40] Pochylý, F., Malenovský, E., Rudolf, P.: The Small Vibration of the Rigid Body in Real Liquid. The Second International Conference „Tools for Mathematical Modelling“, Sankt Peterburg, 1999, Russia, pp. 106-107.
[41] Hlavoň, P., Pochylý, F., Malenovský, E.: Matematický model hydrodynamického tlumiče. 15. národní konference s mezinárodní účastí „Výpočtová mechanika ‘99“. Nečtiny, 1999, str. 91-98.
[42] Pochylý, F., Habán, V.: The Small Vibration of the Rigid Body in the Real Liquid. The National Conference with International Participants „Interaction and Back Feeds ´96“. IT ASCR, Praha, Czech Republic 1996.
[43] Malenovský, E., Pochylý, F.: Úvod k řešení vázaného kmitání tuhého tělesa a reálné tekutiny. Sborník z 15. národní konference s mezinárodní účastí „Výpočtová mechanika ‘99“, str. 227-234. ZČU Plzeň, Nečtiny, 1999.
[44] Pochylý, F., Koutník, J.: The Approximate Solution of Partial Differential Equations by Mean of Bézier Surfaces. Engineering Mechanics, Vol 1, 1994, No 3, pp 165-176.
[45] Kamenický, J., Malenovský, E., Zapoměl, J.: Numerical Analysis of Dynamic Properties of Nonlinear Rotor Systems of Aircraft Jet Engines. International Journal of Rotating Machiney. Vol. 6 No. 5, pp. 333 – 343, 2000.
[46] Malenovský, E., Pochylý F.: The Rigid Body Interaction with Real Liquid. Colloquium „Dynamics of Machines ’2000“ Institute of Thermomechanics ASCR, Prague, 2000 Czech Republic, pp 121 - 128.
[47] Malenovský, E., Hlavoň, P., Pochylý, F.: Computational Modelling of Dynamic Behaviour of Long Squeeze Film Dampers. VIII. International Congress on the Theory of Machines and Mechanisms. Technical University of Liberec, Liberec, Czech Republic, 2000 (in print).
[48] Fluent 4.0, Fluent Incorporated, Centerra Resource Park, 10 Cavendish Court, Lebanon, NH 03866, 1996.
[49] Malenovský, E., Pochylý, F., Zapoměl, J.: The Static Equilibrium Position of a Rotating Shaft. National Conference „Ingeneering Mechanics 2000“, Institute of Theoretical and Applied Mechanics, ASCR, Svratka, 2000, Czech Republic, pp. 205 - 212.
[50] Malenovský, E., Zapoměl, J.: The Investigation of Asymmetric Rotors Dynamical Properties. 5-th International Conference „Numerical Methods in Continuum Mechanics“, pp. 187 – 192, High Tatras, Slovakia, 1994.
[51] Malenovský, E., Ondrůšek, Č., Zapoměl, J.: Some Problems of Computational Solution of Nonlinear Rotor Systems. 6-th International Conference on Numerical Methods in Continuum Mechanics, High Tatras, Slovakia, pp. 276-280, 1996.
[52] Malenovský, E., Pochylý, F., Zapoměl, J.: Analýza hydrodynamických vlastností SQUEEZE filmového tlumiče. Průběžná zpráva grantového úkolu GAČR č. 101/99/1327. Brno 1999.
[53] Pochylý, F.: Dynamika tekutinových systémů. Učební texty VUT FS v Brně. Ediční středisko VUT, Brno, 1990.
[54] Shafei, A., El.: Modelling Fluid Inertia Forces of Short Journal bearings for Rotodynamics Applications. Transactions of the ASME, Journal of Vibrations and Acousttics. Vol. 117, 1995.
[55] Malenovský, E., Pochylý F.: Some results of Computational Modelling of Dynamic Behaviours of Journal Bearings by the Bézier Body Application. (In print). University of Žilina, Slovakia. VIII th. International Conference on Numerical Methods in Continuum Mechanics NMCM 2000. Liptovský Ján, Slovakia, 2000.
[56] Malenovský, E., Pochylý F.: The Computational Modelling of Dynamic Behaviour of SQUEEZE Film Dampers and Journal Bearings (In print). State Technical University Saint-Petersburg. Third International Conference „Differential Equations and Applications“, Saint-Petersburg, Russia, 2000.
[57] Pochylý F., Malenovský, E.: Additinal Mass, Stiffness and Damping Tensors of Journal Bearings. (In print). XXXIX Sympozjon PTMTS Modelowanie w Mechanice. Zeszyty Naukowe Katedry Mechaniki Stosowanej. Politechnika Slaska, Gliwice, Poland 2000.
[58] Dupal, J.: Dynamická analýza a optimalizace těleso - nosníkových a rotorových soustav. Habilitační práce. ZČU FAV Plzeň, 1999.
[59] Zeman, V., Dupal, J., Hlaváč .: Modelování vibrací hřídelových soustav. Vz č. 102-06-94, Plzeň 1994.
[60] Zeman, V., Dupal, J.: Predikce únavové životnosti a parametrická optimalizace nosníkových konstrukcí. Vz č. 102-08-97, Plzeň 1997.
[61] Gasch, R., Pfützner, H.: Dynamika rotorů. SNTL Praha, 1980.
[62] Jei, Y., G., Lee, C., W.: Modal Analysis of Countinuous Asymmetrical Rotor - Bearing system. Journal of Sound and Vibration. Vol. 152 (2), pp. 245 - 262, 1992.
[63] Genta, G.: Whirling of Unsymmetrical Rotors a Finite Element Approach Based on Complex Co - ordinates. Journal of Sound and Vibration. Vol 124 (1), pp. 27 - 53, 1998.
[64] Parszewsky, Z., A., Krodkiewski, J., M., Rucinski, J.: Parametric Instabilities of Rotor - Support System with Asymmetric Stiffness and Damping Matrices. Journal of Sound and Vibration. Vol 109 (1), pp. 111 - 125, 1986.
[65] Yamamoto, T., Ota, H., Kono, K.: On the Unstable Vibrations of a Shaft with Unsymmetrical Stiffness Carrying an Unsymmetrical Rotor. Journal of Applied mechanics. Transactions of the ASME, pp- 313 - 321, 1968.
[66] Kang., Y., Shih, Y., P., Lee, A., Ch: Investigation on the Steady - State Responses of Asymmetric Rotors. Journal of Vibration and Acoustics. Vol. 114, pp. 194 - 208, 1992.
[67] Malenovský, E., Zapoměl, J.: Dynamika rotorů s nesymetrickými rotujícími a nerotujícími částmi. Sborník z 10. národní konference s mezinárodní účastí, „Výpočtová mechanika ’94“ str. 158 - 163. ZČU Plzeň, Pernink, 1994.
[68] Malenovský, E.: Výpočtové modelování dynamických vlastností nelineárních rotorových soustav. Inženýrská mechanika, roč. 6, 1999, č.6 str. 411 - 426.
[69] Li, X., K., Gwynlly, D., Rh., Davies, A., R., Phillips, T., N.: Three - Dimensional Effects in Dynamically Loaded Journal Bearings. International Journal for Numerical Methods in Fluids. Vol 29 pp. 311 - 341, 1999.
[70] Kostrzewsky, G., Taylor, D., V., Flack, R., D., Barrett, L., E.: Theoretical and Experimental Dynamic Characteristics of a Highly Preloaded Three - Lobe Journal Bearing. Tribology transactions. Vol. 41 No. 3, pp. 392 - 398, 1998.
[71] Nedelcu, S.: Numerical Solving of Non - linear Equation for Compressible Fluid Bearings. Proceedings of the Second International Conference „Tools for Mathematical Modelling“, pp. 137 - 142, Saint Peterburg 1999.
[72] Qiu, Z., L., Tieu, A., K.: The Effect of Perturbation Amplitudes on Eight Force Cofficients of Journal Bearings. Tribology transactions. Vol. 39 No. 2, pp. 469 - 475, 1996.
[73] Nikolakopoulos, P., G., Papadopoulos, C., A.: Controllable Misaligned Journal Bearings, Lubricated with Smart Fluids. Journal of Intelligent Material Systems and Structures vol. 8 No. 2, pp. 125-137, 1997.
[74] Nikolakopoulos, P., G., Papadopoulos, C., A.: Controllable High Speed Journal Bearings, Lubricated with Electro - Rheological Fluids. An analytical and experimental approach. Tribology International. Vol. 31 No. 5 pp. 225-234, 1998.
[75] Chen, Ch., l., Yau, H., T.: Chaos in the Imbalance Response of a Flexible Rotor Supported by Oil Film Bearings with Non - Linear Suspension. Nonlinear Dynamics. Vol. 16 pp. 71 - 90, 1998.
[76] Adiletta, G., Guido, A., R., Rossi, C.: Chaotic Motions of a Rigid Rotor in Short Journal Bearings. Nonlinear Dynamics. Vol. 10 pp. 251 - 269, 1996.
[77] Lalane, M., Ferraris, G.: Rotordynamics Prediction in Engineering. John Wiley & Sons, Ltd, 1990.
[78] Malenovský, E., Zapoměl, J., Ondrůšek, Č., Veselka, F.: Vybrané problémy výpočtového a experimentálního modelování nelineárních rotorových soustav. Průběžná zpráva úkolu GAČR č. 101/96/0781, Brno 1997.
[79] Muszynska, A.: Whirl and Whip - Rotor/Bearing Stability Problems. Journal of Sound and Vibrations. (1986) Vol. 110 (3), pp. 443 - 462.
[80] Zhao, J., Y., Linnett, I., W., McLean, L., J.: Subharmonic and Quasi - Periodic Motions of an Eccentric Squeeze Film Damper Mounted on Rigid Rotor. ASME Journal of Vibration and Acoustics, Vol. 116, 1994, pp. 357-363.
[81] Muszynska, A., Bently, D., E.: Frequency - Swept Rotating Input Perturbation Techniques and Identification of the Fluid Force Models in Rotor/Bearing/Seal Systems and Fluid Handling Machines. Journal of Sound and Vibrations. (1990) Vol. 143 (1), pp. 103 - 124.
[82] Lau, S., L., Yuen, S., W.: The Hopf Bifurcation and Limit Cycle by the Incremental Harmonic Balance Method. Computer Methods in Applied Mechanics and Engineering, Vol. 91 (1991) 1109 - 1121.
[83] Flack, R., D., Kostrewsky, G., J.: A Comparison of the Experimental and Predicted Rigid Rotor Stability Threshold of a Highly Preloaded Three Lobe Bearing. Fiftf International Conference on Rotor Dynamics, pp. 501 - 512, Darmstadt 1994, Germany.
[84] Zapoměl, J., Malenovský, J.: Numerical Methods for the Stability Investigation of Flexural Vibration of Rotor Systems Supported by Fluid Film Bearings. Fiftf International Conference on Rotor Dynamics, pp. 212 - 223, Darmstadt 1998, Germany.
[85] Jecmenica, M., White, M., F., Bachschmid, N., Tanzi, E.: Non-linear Inverse Modelling to estimate Forces in Journal Bearings from Measured Orbits. Fiftf International Conference on Rotor Dynamics, pp. 536 - 547, Darmstadt 1994, Germany.
[86] Kamenický, J., Malenovský, E., Zapoměl, J.: Numerical Simulation of Dynamic Properties of Nonlinear Rotor Systems of Aircraft Jet Engines. Isromac 7, The 7th International Symposium on Transport Phenomena and Dynamics of Rotating Machinery, pp. 941 - 949. Honolulu, 1998, USA.
[87] Zhao, J., Y., Linnett, I., W., McLean, L., J.: Unbalance Response of a Flexible Rotor Support by a Squeeze Film Damper. ASME Journal of Vibration and Acoustics, Vol. 120, 1988, pp. 32-38.
[88] Tondl, A., Lazar, L.: Nonlinear Resonances and their Identification. Acta Technica ČSAV Praha, Czech Republic 1976, pp. 74 - 99.
[89] Stodola, A.: Dampf und Gasturbinen. Springer Verlag, 1927.
[90] Tondl, A.: Kmitanie rotorov s nerovnakou tuhosťou hriaděla. SAV Bratislava, 1958.