5. Využití elektroanalogie při analýze a modelování dynamických vlastností mechanických soustav
Analogie mezi mechanickými, elektrickými či hydraulickými systémy je známá a lze ji účelně využívat při analýze dynamických systémů. Vychází z podobnosti obecných zákonitostí tzv. mechanických sítí na straně jedné a například elektrických obvodů na straně druhé.
V případě analogie mezi mechanickými a elektrickými systémy rozlišujeme mezi tzv. pasivní a aktivní elektromechanickou analogií. V prvém případě jednotlivé prvky elektrických obvodů nedodávají do obvodu více energie, než získaly, ve druhém případě jednotlivé prvky elektrických obvodů získávají určité množství energie z pomocných zdrojů a předávají ji dále. V této souvislosti mluvíme o aktivních prvcích – zesilovačích, které byly využívány při konstrukci analogových počítačů.
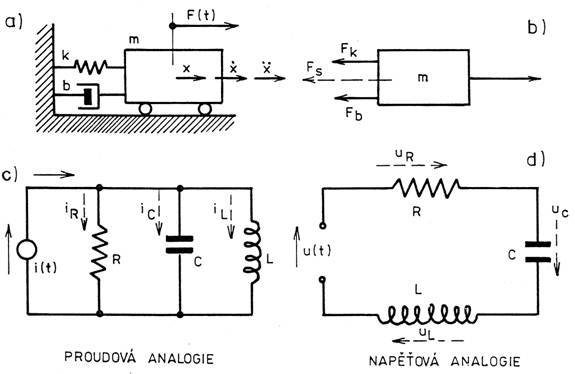
V dalším se budeme zabývat především podstatou pasivní elektromechanické analogie. Uvažujme dynamický systém s jedním stupněm volnosti, buzený časově proměnnou silou, znázorněný na obr. 5.1a.
Obr. 5.1
Pohybovou rovnici můžeme napsat s využitím ďAlembertova zákona ve tvaru (obr. 5.1b)
![]() (5.1)
(5.1)
kde ![]()
Využijeme-li známých kinematických relací
![]()
lze přepsat rovnici (5.1) do tvaru integrodifrerenciální rovnice
![]() (5.2)
(5.2)
ďAlembertovu zákonu v mechanice odpovídají formálně Kirchhoffovy zákony v elektrotechnice. Na aplikaci I. Kirchhoffova zákona je založena proudová analogie (tzv. „m-C“ analogie) a na aplikaci II. Kirchhoffova zákona je založena napěťová analogie (tzv. „m-L“ analogie).
Proudová analogie
I. Kirchhoffův lze interpretovat takto; algebraický součet proudů v uzlu elektrického obvodu, v němž jsou všechny prvky (R, C, L) zapojeny paralelně, je roven nule, tudíž platí (viz obr. 5.1c)
![]() (5.3)
(5.3)
Kde
![]()
a po dosazení těchto vztahů do rov. (5.3)
![]() (5.4)
(5.4)
Formální podobnost rovnice (5.4) s rovnicí (5.2) je na prvý pohled zřejmá. Budící síla (resp. moment) je při tomto typu analogie reprezentován generátorem časově proměnného proudu, který musí zaručovat nezávislost amplitudy proudu na odběru. Je-li zdrojem buzení v mechanické soustavě kinematická veličina (výchylka, rychlost, zrychlení), je analogické buzení elektrického obvodu realizováno generátorem napětí. Odezva mechanické soustavy pak v elektrickém obvodu odpovídá časové změně napětí.
Napěťová analogie
Vychází, jak již bylo řečeno, z II. Kirchhoffova zákona; algebraický součet součinů proudů a odporů (ohmických napětí), počítaje v to i vnitřní odpory, je roven algebraickému součtu elektromotorických napětí (sil) působících ve smyčce. Odpovídající matematické vyjádření bude (viz obr. 5.1d):
![]() (5.5)
(5.5)
kde
![]()
a po dosazení do (5.5):
![]() (5.6)
(5.6)
což je opět integrodiferenciální rovnice formálně totožná s rovnicemi (5.2) a (5.4). Silové (resp. momentové) buzení mechanické soustavy je v elektrickém obvodu nyní vyjádřeno generátorem časově proměnlivého napětí, kinematické buzení je zastoupeno generátorem proudu a odezva mechanické soustavy odpovídá časově proměnlivému proudu v jednotlivých uzlech elektrického obvodu.
U složitějších mechanických soustav s více volnosti se setkáváme s paralelním a sériovým řazením prvků, případně s jejich kombinacemi. Připomeňme si, že při paralelním řazení prvků mechanické soustavy mají všechny prvky při působení vnější síly stejnou výchylku (resp. rychlost). U sériového uspořádání pak stejná síla působící na soustavu vyvolává parciální výchylky (resp. změny rychlosti) na jednotlivých prvcích soustavy v závislosti na jejich parciálních tuhostech.
Pro elektroanalogii vyplývají z těchto skutečností následující závěry:
· pro proudovou analogii je typické, že paralelnímu resp. sériovému uspořádání prvků mechanické soustavy odpovídají paralelní, resp. sériové, řazení prvků elektrického obvodu;
· pro napěťové analogii je naopak typické, že paralelnímu, resp. sériovému uspořádání prvků mechanické soustavy odpovídá sériové. resp. paralelní řazení prvků elektrického obvodu.
Z těchto skutečností pak vychází i způsoby modelování analogických elektrických obvodů ke složitým mechanickým soustavám. Odpovídající si základní veličiny jsou uvedeny v tabulce tab. 4.
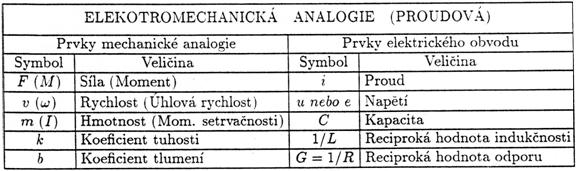
Tab. 4
Na závěr uveďme ještě tyto skutečnosti. I když po formální stránce jsou rovnice mechanické soustavy a elektrického obvodu analogické, reprezentují různé fyzikální jevy; vzájemná podobnost neplatí absolutně. Tak například jsou rozdíly v hodnocení tzv. sekundárních ztrát u reálných procesů v mechanických soustavách a ztrát v elektrických obvodech (ztráty se vinutí cívek, ztráty z důsledku samoindukčnosti apod.). Další skutečnost je významnější; setrvačné síly (momenty) v mechanických soustavách jsou funkcemi zrychlení, která jsou vztažena k nehybnému základnímu prostoru. Proto je zapotřebí v analogických elektrických obvodech vztahovat indukčnosti (při napěťové analogii), resp. kapacity (při proudové analogii) k nulovým hladinám napětí, resp. proudu.
Příklad A5:
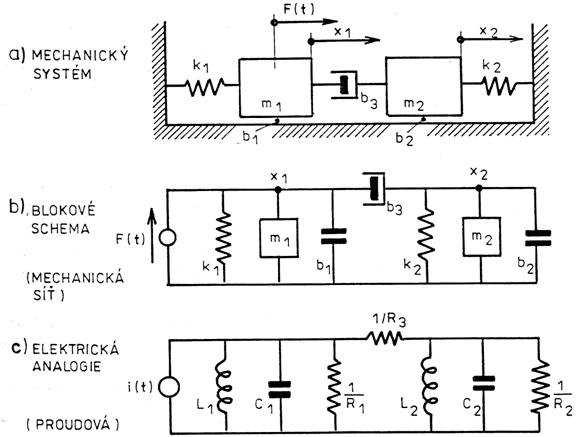
K mechanickému systému se dvěma stupni volnosti (viz obr. 5.2a) přiřaďte blokové schéma mechanické soustavy (tzv. mechanickou síť) a analogický elektrický obvod. Napište odpovídající pohybové rovnice pro mechanický systém a rovnice elektrického obvodu.
Obr. 5.2
Při sestavování elektrických obvodů, analogických k mechanickým soustavám, nám může velmi pomoci blokové schéma mechanické soustavy – mechanická síť, která je v případě proudové analogie formálně totožná s elektrickým obvodem. Pro mechanickou soustavu dle obr. 5.2a je tato síť znázorněna na obr. 5.2b a odpovídající elektrický obvod je na obr. 5.2c.
Pohybové
rovnice mechanické soustavy, zavedeme-li operátor derivace ![]() , budou ve tvaru:
, budou ve tvaru:
 (5.7)
(5.7)
Matematická formulace pro elektrický obvod (viz tab. T4):
 (5.8)
(5.8)
Formální podobnost soustav rovnic (5.7) a (5.8) je na prvý pohled zřejmá. I metodika jejich řešení může být stejná. Základní výhodou elektrické analogie je ale skutečnost, že elektrické obvody mohou být (na rozdíl od mechanických soustav) velmi snadno sestavovány v laboratoři a především lze velmi jednoduše realizovat změny jednotlivých prvků těchto obvodů a sledovat jejich vliv na dynamické vlastnosti modelu.