3 Základní teorie stability dynamických systémů
3.1 Stabilita ve smyslu Ljapunova
Relativně velkého počtu definic stability uvedeme jen nejdůležitější, které bezprostředně vycházejí ze základní myšlenky stability, formulované ruským matematikem Ljapunovem.
Uvažujeme nařízený dynamický systém, modelovaný rovnicí
![]() (3.1)
(3.1)
nebo jedná-li se o autonomní systém, rovnicí
![]() (3.2)
(3.2)
Budeme
vyšetřovat podmínky, za kterých bude rovnovážný stav systému ![]() stabilní. O funkcích
stabilní. O funkcích ![]() předpokládejme, že
jsou spojité a že mají spojité derivace podle proměnných
předpokládejme, že
jsou spojité a že mají spojité derivace podle proměnných ![]() . Nechť
. Nechť ![]() představuje řešení stavové
rovnice v čase t při počátečních podmínkách
představuje řešení stavové
rovnice v čase t při počátečních podmínkách ![]() v čase
v čase ![]() . Nejprve budeme
definovat stabilitu rovnovážného stavu.
. Nejprve budeme
definovat stabilitu rovnovážného stavu.
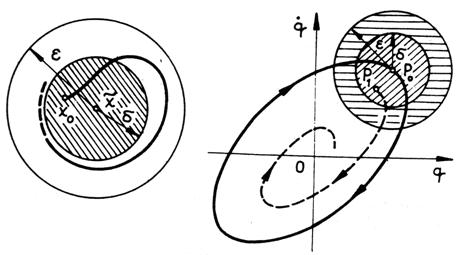
Obr. 3.1
Podle
Ljapunova je rovnovážný stav ![]() neřízeného dynamického systému stabilní,
jestliže pro každou reálnou hodnotu
neřízeného dynamického systému stabilní,
jestliže pro každou reálnou hodnotu ![]() existuje takové reálné číslo
existuje takové reálné číslo ![]() , pro které platí,
že při
, pro které platí,
že při
![]() je
je ![]() pro
pro
![]() (3.3)
(3.3)
Symbolem ![]() je označena norma matice.
Smysl tohoto tvrzení je patrný z obr. 31a. Rovnovážný stav je stabilní,
když po malém vychýlení z tohoto stavu (vlivem „poruch“ amplitud nebo
fází) zůstane trajektorie zastupujícího bodu systému v okolí
je označena norma matice.
Smysl tohoto tvrzení je patrný z obr. 31a. Rovnovážný stav je stabilní,
když po malém vychýlení z tohoto stavu (vlivem „poruch“ amplitud nebo
fází) zůstane trajektorie zastupujícího bodu systému v okolí ![]() rovnovážného stavu.
Podle této definice nemusí trajektorie zastupujícího bodu v čase
rovnovážného stavu.
Podle této definice nemusí trajektorie zastupujícího bodu v čase ![]() nutně dosáhnout
rovnovážného stavu
nutně dosáhnout
rovnovážného stavu ![]() ,
ale musí setrvat v předepsané blízkosti tohoto stavu.
,
ale musí setrvat v předepsané blízkosti tohoto stavu.
Rovnovážný
stav autonomního systému je asymptoticky stabilní, je-li stabilní ve
smyslu Ljapunovy definice a každý pohyb, vycházející ze stavu ![]() , dostatečně blízkého
stavu
, dostatečně blízkého
stavu ![]() ,
konverguje v čase
,
konverguje v čase ![]() ke stavu
ke stavu ![]()
Stabilitu
periodického řešení budeme chápat jako stabilitu pohybu podél určité
trajektorie, kterou je v případě periodických řešení limitní cyklus. Sledujeme,
zda bod P1 (reprezentující okamžitý stav systému), který se pohybuje
po trajektorii blízké limitnímu cyklu, zůstává trvale ve zvolené oblasti ![]() , která obsahuje
oblast viz obr. 3.1b. Bod P0, reprezentující střed oblastí
, která obsahuje
oblast viz obr. 3.1b. Bod P0, reprezentující střed oblastí ![]() i
i ![]() , se přitom pohybuje
po limitním cyklu. Zůstává-li pro každé
, se přitom pohybuje
po limitním cyklu. Zůstává-li pro každé ![]() bod P1 trvale v oblasti,
je periodické řešení ve smyslu Ljapunovovy definice (3.3) stabilní.
bod P1 trvale v oblasti,
je periodické řešení ve smyslu Ljapunovovy definice (3.3) stabilní.
Při analýze stability odezvy řízených (buzených) systémů je minimálním požadavkem pro stabilitu ohraničený vstup a výstup a stabilita periodického řešení neřízeného systému (včetně stability počátečních podmínek).
3.2 Určování podmínek stability pro rovnovážné stavy systémů
Uvažujeme autonomní dynamický systém, popsaný stavovou rovnicí (3.2), kterou lze rozepsat na soustavu rovnic
![]() (3.4)
(3.4)
kde ![]() jsou obecně nelineární funkce. Hodnoty
rovnovážných stavových veličin
jsou obecně nelineární funkce. Hodnoty
rovnovážných stavových veličin ![]() dostaneme jako řešení soustavy rovnic
dostaneme jako řešení soustavy rovnic
![]() (3.5)
(3.5)
Nyní definujeme poruchy ![]() jako malé
odchylky od rovnovážného stavu. Pohyb systému kolem rovnovážných hodnot
stavových veličin pak definují rovnice:
jako malé
odchylky od rovnovážného stavu. Pohyb systému kolem rovnovážných hodnot
stavových veličin pak definují rovnice:
![]() (3.6)
(3.6)
Podle
Ljapunovovy definice asymptotické stability bude rovnovážný stav systému
stabilní, budou-li splněny relace ![]() pro všechny i. Dosadíme vztahy (3.6)
do rovnic (3.5). Po rozvinutí funkcí
pro všechny i. Dosadíme vztahy (3.6)
do rovnic (3.5). Po rozvinutí funkcí ![]() do Taylorových řad v okolí hodnot
do Taylorových řad v okolí hodnot ![]() a po zanedbání
vyšších členů rozvojů od druhého řádu výše, dostaneme soustavu rovnic
a po zanedbání
vyšších členů rozvojů od druhého řádu výše, dostaneme soustavu rovnic
![]()
nebo stručně v maticovém zápisu
![]() (3.7)
(3.7)
kde ![]() , kde
, kde 
Řešení
soustavy (3.7) je známé a rovno ![]() ; po jeho dosazení do (3.7) a po
vyloučení triviálního řešení dostaneme maticovou formulaci problému vlastních
hodnot matice A:
; po jeho dosazení do (3.7) a po
vyloučení triviálního řešení dostaneme maticovou formulaci problému vlastních
hodnot matice A:
![]() (3.8)
(3.8)
Jak je známo, tato rovnice má
netriviální řešení tehdy a jen tehdy, je-li determinant matice soustavy roven
nule. Ljapunov dokázal, že rovnovážný stav systému, charakterizovaný
hodnotami ![]() je
stabilní, jsou-li reálné části všech vlastních hodnot
je
stabilní, jsou-li reálné části všech vlastních hodnot ![]() záporné, tj. když platí
záporné, tj. když platí
![]() (3.9)
(3.9)
Splnění nerovnosti (3.9) je totožné s požadavkem záporného znaménka reálných částí všech kořenů tzv. charakteristické rovnice, definované jako
![]() (3.10)
(3.10)
kterou lze rozepsat do tvaru
![]() (3.11)
(3.11)
Aby nebylo zapotřebí často pracně počítat kořeny polynomu (3.11), byla sestavena kritéria, podle nichž lze určit znaménka.
Podle Routh-Hurwitzova kritéria budou mít reálné části kořenů charakteristické rovnice záporné znaménka, budou-li:
· všechny koeficienty charakteristické rovnice kladná čísla;
· budou-li splněny následující determinantní nerovnosti:
 (3.12)
(3.12)
Pro systémy s větším počtem stupňů volnosti je analýza vlastností determinantů (3.12) dosti nepřehledná. Hledaly se proto jednodušší formulace. Tak například podle Liénardova kritéria postačí – při splnění prvé Routh – Hurwitzovy podmínky – aby byly splněny „pouze“ následující determinantní nerovnosti:
![]() (3.13)
(3.13)
kde determinanty ![]() jsou definovány
stejně jako v rovnici (3.12). Ilustrujme si vyloženou problematiku
následujícím příkladem.
jsou definovány
stejně jako v rovnici (3.12). Ilustrujme si vyloženou problematiku
následujícím příkladem.
Analyzujme
činnost gyroskopického stabilizátoru polohy, znázorněného na obr. 3.2. Na rám 2
nechť působí vnější moment ![]() , který má být ve svých účincích na
gyroskop kompenzován pomocí momentu
, který má být ve svých účincích na
gyroskop kompenzován pomocí momentu ![]() vyvozovaného motorem 4. Toho se dosáhne
tím, že potenciometr P, jehož kontakt C se otáčí spolu s osou 01,
oddělí napětí, které se zesiluje v zesilovači Z a přivádí se na
svorky motoru. (je-li kontakt C v neutrální poloze, je
vyvozovaného motorem 4. Toho se dosáhne
tím, že potenciometr P, jehož kontakt C se otáčí spolu s osou 01,
oddělí napětí, které se zesiluje v zesilovači Z a přivádí se na
svorky motoru. (je-li kontakt C v neutrální poloze, je ![]() a také
a také ![]() ). Tlumící moment je roven
). Tlumící moment je roven ![]() (R - Rayleighova
konstanta).
(R - Rayleighova
konstanta).
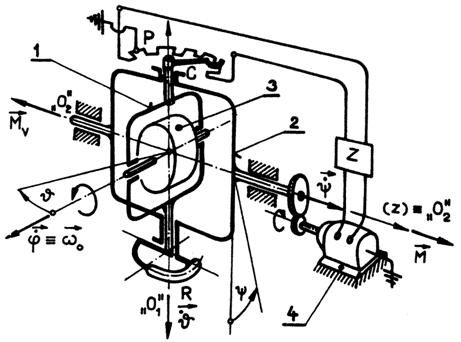
Obr. 3.2
Pohybové rovnice gyroskopického systému na obr. 3.2 jsou:
 (3.14)
(3.14)
kde význam označení je stejný
jako v technických rovnicích gyroskopu a ω1, ω2
jsou úhlové rychlosti rámu 1 a 2. Doplníme-li rovnice (3.14) identitou ![]() , lze zapsat ve tvaru
stavové rovnice řízeného dynamického systému:
, lze zapsat ve tvaru
stavové rovnice řízeného dynamického systému:
 (3.15)
(3.15)
Rovnovážné řešení dostaneme, položíme-li stranu rovnice (3.15) rovnu nule. Tím dostaneme soustavu algebraických rovnic, která má řešení:
![]() (3.16)
(3.16)
Systém se ustálí na výchylce,
která může být nulová v případě, že ![]() . Koeficienty
. Koeficienty ![]() matice A, viz rov. (3.7),
budou:
matice A, viz rov. (3.7),
budou:
![]()
Charakteristická rovnice typu (3.11) bude
 (3.17)
(3.17)
a je zřejmé, že její koeficienty jsou kladné (je to nutné i z fyzikálních důvodů). Z determinantních nerovností (3.12) pak plynou následující podmínky:
 (3.18)
(3.18)
Na základě rozboru výsledků (3.18)
lze tedy učinit závěr, že vhodnou volbou tlumící konstanty R lze vždy
dosáhnout stability řešení. Netlumený systém by byl nestabilní. Aby se u
skutečných systémů tohoto typu eliminoval vliv úhlové rychlosti ω1
na výchylku ![]() ,
užívá se dvou stejných gyroskopů, uložených rovnoběžně ve společném rámu. Pohyb
těchto gyroskopů pak je mechanicky vázán.
,
užívá se dvou stejných gyroskopů, uložených rovnoběžně ve společném rámu. Pohyb
těchto gyroskopů pak je mechanicky vázán.
Výsledky analýzy stability se uplatňují i ve speciálních odvětvích dynamiky systémů, například v teorii regulace. Jako příklad uvedeme Hartnellův regulátor, znázorněný na obr. 3.3.
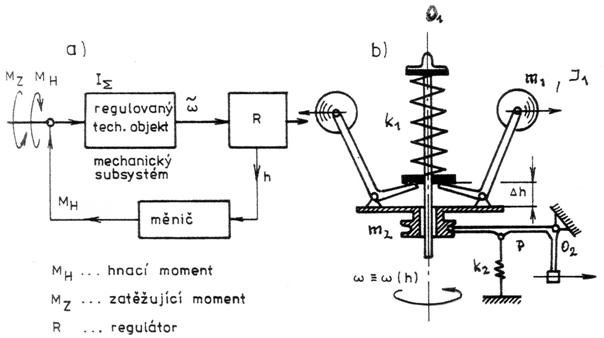
Obr. 3.3
Parametry potřebné pro výpočet jsou znázorněny ve výpočtovém schématu a představují: m1 hmotnost vyvažovacího závaží, I1 moment setrvačnosti úhlové páky včetně závaží k ose 01, I2 moment setrvačnosti páky P k ose 02, m2 hmotnost přestavovací objímky, k1 tuhost pružiny regulátoru a k2 tuhost vyrovnávací sílu regulátoru zanedbáme.
Okamžitou hodnotu kinetické energie můžeme vyjádřit
 (3.19)
(3.19)
když jsme položili
![]()
Potenciální energie systému, označíme-li předpětí v pružinách s1 a s2, definuje rovnice:
 (3.20)
(3.20)
Dosadíme-li vztahy (3.19) a (3.20) do Lagrangeovy rovnice II. druhu
![]()
dostaneme pohybovou rovnici regulátoru:
 (3.21)
(3.21)
Tato rovnice
je nelineární, neboť obě proměnné, h i ω, v ní
vystupují v součinu. Omezíme-li se na vyšetřování „malých“ výchylek kolem
rovnovážné polohy ![]() ,
tj. vyšetřujeme-li pohyby
,
tj. vyšetřujeme-li pohyby
![]() (3.22)
(3.22)
lze rovnici (3.21) linearizovat.
Regulační proces linearizovaného systému je totiž mnohem jednodušší a lze jej
přehledně sledovat pomocí blokového schématu na obr. 3.3c. Nechť se regulované
zařízení otáčelo v čase ![]() úhlovou rychlostí
úhlovou rychlostí ![]() . Když na ně v čase
. Když na ně v čase ![]() začne působit brzdný
moment
začne působit brzdný
moment ![]() ,
změní se otáčky o Δω a objímka regulátoru se posune
z rovnovážného stavu o Δh. Posuv objímky způsobí
prostřednictvím měniče zvětšení rychlosti hřídele regulátoru, na který začne
působit hnací moment MH(t). Veličiny Δω, Δh
a moment MH(t) jsou funkcemi času a jejich vzájemnou
souvislost můžeme vyjádřit simultánními diferenciálními rovnicemi
,
změní se otáčky o Δω a objímka regulátoru se posune
z rovnovážného stavu o Δh. Posuv objímky způsobí
prostřednictvím měniče zvětšení rychlosti hřídele regulátoru, na který začne
působit hnací moment MH(t). Veličiny Δω, Δh
a moment MH(t) jsou funkcemi času a jejich vzájemnou
souvislost můžeme vyjádřit simultánními diferenciálními rovnicemi
 (3.23)
(3.23)
kde IΣ je momentem setrvačnosti hmot, rotujících s hřídelem regulátoru a A, B, C, K jsou konstanty. Přitom druhou rovnici soustavy (3.23) definujeme na základě rovnice (3.21).
Derivujeme-li nyní druhou rovnici soustavy (3.23) podle času a dosadíme-li ji za Δω do prvé rovnice, dostaneme s ohledem na třetí rovnici (3.23) a po úpravě:
![]() (3.24)
(3.24)
Tři integrační konstanty, nutné
pro řešení této rovnice, získáme z počátečních podmínek, například ![]() . Charakteristická
rovnice modelu (3.24) má pak tvar
. Charakteristická
rovnice modelu (3.24) má pak tvar
![]() (2.25)
(2.25)
O řešení rovnic typu (3.25) je známo, že mají vždy jeden kořen reálný. Podmínkou stability řešení je, aby rovnice (3.25) měla všechny kořeny reálné záporné nebo jeden kořen reálný záporný a dva kořeny sdružené s reálnou zápornou částí. Výběr parametrů systému, za kterých je těmto požadavkům vyhověno, pak určíme na základě rozboru Routh-Hurwitzových podmínek.