4 Řešení odezev dynamických systémů ve fázové rovině
4.1 Základní pojmy teorie fázové roviny
Mnohé problémy analýzy dynamických systémů vedou k řešení diferenciální rovnice
![]() (4.1)
(4.1)
kde ![]() je obecně nelineární funkce výchylek x
a rychlostí
je obecně nelineární funkce výchylek x
a rychlostí ![]() .
Přiřadíme-li ke každé výchylce x její rychlost (tj. derivaci) ve stejném
čase, bude v tomto časovém okamžiku definován stav systému a také jeho
zobrazení v tzv. fázové rovině
.
Přiřadíme-li ke každé výchylce x její rychlost (tj. derivaci) ve stejném
čase, bude v tomto časovém okamžiku definován stav systému a také jeho
zobrazení v tzv. fázové rovině ![]() . Polohu systému ve fázové rovině
pak určuje tzv. zastupující bod.
. Polohu systému ve fázové rovině
pak určuje tzv. zastupující bod.
Zavedením
nové proměnné ![]() můžeme
přenést rovnici (4.1) na soustavu dvou rovnic prvého řádu
můžeme
přenést rovnici (4.1) na soustavu dvou rovnic prvého řádu
![]() (4.2)
(4.2)
nebo obecně
![]() (4.3)
(4.3)
což je nejjednodušší forma stavového prostoru. Pokud funkce P(x,y) a Q (x,y) neobsahují přímo čas t, mluvíme o systému autonomním, v opačném případě mluvíme o systému neautonomním.
Ve fázové
rovině ![]() –
resp.
–
resp. ![]() –
pohyb modelu reálného dynamického systému zobrazuje fázová křivka jejíž
diferenciální rovnici získáme, vyloučíme-li z rovnic (4.3) čas t:
–
pohyb modelu reálného dynamického systému zobrazuje fázová křivka jejíž
diferenciální rovnici získáme, vyloučíme-li z rovnic (4.3) čas t:
![]() (4.4)
(4.4)
Na základě takto formulované fázové křivky lze fázový prostor rozložit na všechny možné trajektorie; takovu množinu možných fázových dřivek pak nazýváme fázovým portrétem dynamického systému. Rychlost, se kterou se po fázové křivce pohybuje zastupující bod, nazýváme fázovou rychlostí:
 (4.5)
(4.5)
Zrychlení je pak dáno vztahem
![]() (4.6)
(4.6)
Z rovnice (4.4) je zřejmé, že rovnice fázové trajektorie neobsahuje přímo čas. Máme-li ale vypočítat dobu pohybu zastupujícího bodu mezi dvěma body A a B, postupujeme takto:
![]() (4.7)
(4.7)
Základní význam mají ty body roviny (resp. fázové křivky), ve kterých je fázová rychlost nulová. Tyto body nazýváme zvláštními nebo také singulárními body. Fyzikální význam singulárních bodů spočívá v tom, že reprezentují rovnovážné stavy dynamických systémů. Určení polohy těchto bodů ve fázové rovině vyplývá z rovnice (4.5); aby bylo v = 0, musí platit:
![]() a
a ![]() (4.8)
(4.8)
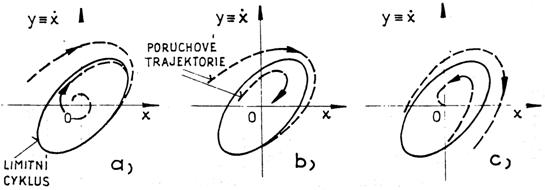
Obr. 4.1
Ostatní body fázové roviny, ve kterých je v ≠ 0, nazýváme regulárními. Každým regulárním bodem může procházet pouze jedna fázová trajektorie. Fázové křivky respektují určitá pravidla:
·
v horní polovině (![]() ) se zastupující bod pohybuje po
libovolné fázové křivce zleva doprava, v dolní polovině (
) se zastupující bod pohybuje po
libovolné fázové křivce zleva doprava, v dolní polovině (![]() ) naopak;
) naopak;
· v regulárních bodech, které leží na ose [x], protínají fázové křivky tuto osu pod pravými úhly;
· v regulárních bodech, které neleží na ose [x], nemůže mít fázová trajektorie tečnu rovnoběžnou s osou [x];
· pokud jakákoliv spojitá fázová trajektorie protíná osu [x] ve dvou regulárních bodech, leží mezi těmito body nanejvýše jeden singulární bod;
· periodickým režimům pohybu systému odpovídají uzavřené fázové křivky, které neprocházejí zvláštními body. Doba pohybu zastupujícího bodu po takové křivce odpovídá periodě pohybu.
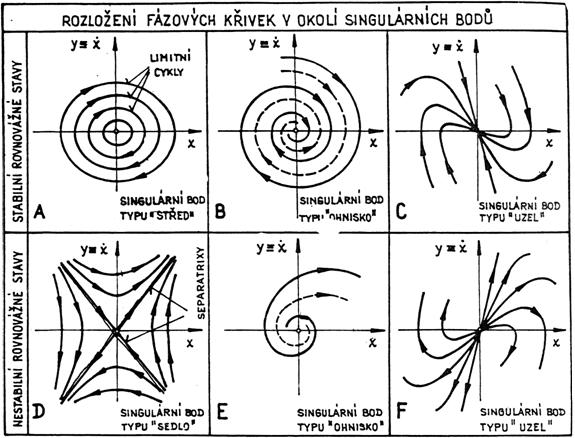
Struktura základních typů fázových křivek v blízkosti singulárních bodů, při rovnovážných stavech, je patrná z tabulky tab. 1. Rozeznáváme čtyři základní typy singulárních bodů: stabilní „střed“, nestabilní „sedlo“, a „ohnisko“ a „uzel“, které mohou být stabilní i nestabilní. Izolované uzavřené fázové křivky, odpovídající rovnovážným stavům autonomních systémů, nazýváme limitní cykly. Působením vnější poruchy se zatupující bod vychýlí z dráhy podél limitního cyklu a pohybuje se po tzv. poruchové trajektorii. Směřují-li poruchové trajektorie z obou stran k limitnímu cyklu, je limitní cyklus stabilní (obr. 4.1a), směřuje-li poruchová trajektorie k limitnímu cyklu jen z jedné strany, je cyklus polostabilní (obr. 4.1b), vzdalují-li se poruchové trajektorie od limitního cyklu na obou stranách, je příslušný cyklus nestabilní (obr. 4.1c).
Tabulka 2
Izolované fázové trajektorie procházejí „přes“ singulární body typu „sedlo“, se nazývají separatrixy – viz tabulka tab. 2, obr. D. Pohyb mechanického systému, odpovídající pohybu zastupujícího bodu po separatrixách je nestabilní a fyzikálně neralizovatelný. Důležité však je, že separatrixy rozdělují fázovou rovinu na oblasti počátečních podmínek, odpovídajících principálně rozdílným typům pohybů systémů (rezonanční resp. nerezonanční pohyby).
Z obrazů fázových trajektorií v okolí zvláštních bodů tedy můžeme vyhodnotit nejen trajektor pohybu systému, ale objasnit i otázku stability rovnovážných stavů.
4.2 Příklady dynamické analýzy jednoduchých systémů
Příklad A1:
Analyzujte chování netlumeného harmonického oscilátoru ve fázové rovině. Rovnice harmonického oscilátoru, který je modelem dynamických systémů má tvar:
![]() (4.9)
(4.9)
lze ji nahradit soustavou rovnic
typu (4.3), dosadíme-li za ![]() a
a ![]() . Odpovídající rovnice fázové
trajektorie je
. Odpovídající rovnice fázové
trajektorie je
![]()
nyní přepíšeme tuto rovnici do tvaru, který lze snadno integrovat:
![]()
a integrací dostaneme
![]() C je integrační
konstanta (4.10)
C je integrační
konstanta (4.10)
Obrazem této rovnice ve fázové
rovině jsou elipsy, které představují jednotlivé trajektorie pro různé hodnoty
konstanty C, jak je to patrno z tabulky tab. 2, obr. A. Pro ![]() degeneruje elipsa
(viz. 2) v bod o souřadnicích
degeneruje elipsa
(viz. 2) v bod o souřadnicích ![]() . Protože právě v tomto bodě jsou
splněny podmínky (4.8), jedná se o singulární bod. V tomto případě
singulárním bodem neprochází žádná z fázových trajektorií, pouze jej
obalují. Singulární bod tohoto typu nazýváme „středem“. Rychlost zastupujícího
bodu vypočítáme podle vztahu (4.5):
. Protože právě v tomto bodě jsou
splněny podmínky (4.8), jedná se o singulární bod. V tomto případě
singulárním bodem neprochází žádná z fázových trajektorií, pouze jej
obalují. Singulární bod tohoto typu nazýváme „středem“. Rychlost zastupujícího
bodu vypočítáme podle vztahu (4.5):
![]()
Je zřejmé, že nulovou bude tato
rychlost jen v singulárním bodě. Můžeme tedy vyslovit následující závěr:
analyzovaný systém může vykonávat stabilní periodické pohyby při libovolných
počátečních podmínkách s výjimkou případu, kdy ![]() .
.
Příklad A2:
Analyzujme chování harmonického oscilátoru s malým vazkým třením a nakreslete odpovídající fázovou trajektorii.
V tomto případě analyzujeme rovnici
![]()
Pomocí rovnic (4.3), kde ![]() a
a ![]() , sestavíme
diferenciální rovnici fázových trajektorií:
, sestavíme
diferenciální rovnici fázových trajektorií:
![]() (4.11)
(4.11)
Pro usnadnění integrace rovnice (4.11)
je vhodné zavést substituci ![]() . Pak lze psát
. Pak lze psát ![]() a po dosazení těchto vztahů
do (4.11) dostaneme:
a po dosazení těchto vztahů
do (4.11) dostaneme:
![]()
Z tohoto vztahu můžeme vyjádřit
![]()
respektive
![]()
Po integraci této rovnice získáme výraz
![]()
kde C je opět integrační konstanta. Umocníme-li tento výraz a přejdeme-li k původním souřadnicím x a y dostaneme
![]() (4.12)
(4.12)
Kde ![]() . Rovnici (4.12) přísluší opět rodina
fázových křivek, které vyplňují fázovou rovinu. O jaký typ křivek jde, zjistíme
snadno následujícím postupem. Položíme
. Rovnici (4.12) přísluší opět rodina
fázových křivek, které vyplňují fázovou rovinu. O jaký typ křivek jde, zjistíme
snadno následujícím postupem. Položíme ![]() a
a ![]() . V souřadnicích ρ, φ
(polárních) přejde rovnice (4.12) do tvaru
. V souřadnicích ρ, φ
(polárních) přejde rovnice (4.12) do tvaru
![]() (4.13)
(4.13)
ze kterého je zřejmé, že fázové
křivky představují spirály, směřující k počátku ![]() , který se v tomto
případě nazývá stabilním ohniskem, viz tabulka tab. 2 (obr. B). Počátku ovšem
nemůže být dosaženo v konečném čase. Rychlost zastupujícího bodu,
pohybujícího se po těchto fázových křivkách, je
, který se v tomto
případě nazývá stabilním ohniskem, viz tabulka tab. 2 (obr. B). Počátku ovšem
nemůže být dosaženo v konečném čase. Rychlost zastupujícího bodu,
pohybujícího se po těchto fázových křivkách, je ![]() . Pohyb systému v tomto případě
směřuje asymptoticky k rovnovážnému bodu, ve kterém ustane.
. Pohyb systému v tomto případě
směřuje asymptoticky k rovnovážnému bodu, ve kterém ustane.
Příklad A3:
Analyzujte chování harmonického oscilátoru se suchým třením a nakreslete odpovídající fázovou trajektorii.
Uvážíme-li vliv suchého tření, lze pohybovou rovnici harmonického oscilátoru zapsat ve formě
![]() , kde
, kde ![]() (4.14)
(4.14)
Zavedeme novou proměnnou ![]() a můžeme psát:
a můžeme psát:
 (4.15)
(4.15)
S ohledem na substituce (4.15) přejde pohybová rovnice (4.14) do tvaru
![]() (4.16)
(4.16)
A nyní již lze analyzovat stejně
jako v přechozích úlohách. Položíme tedy ![]() a
a ![]() , sestavíme diferenciální rovnici
fázových trajektorií
, sestavíme diferenciální rovnici
fázových trajektorií
![]() (4.17)
(4.17)
a upravíme ji do tvaru
![]() (4.18)
(4.18)
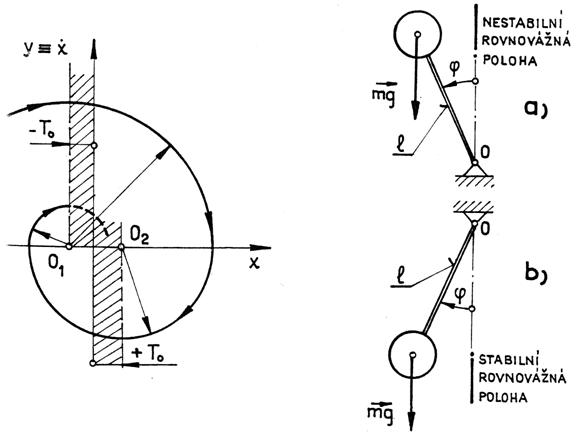
Obr. 4.2 Obr. 4.3
Po integraci dostaneme rovnici
kružnice (viz obr. 4.2) se středem v bodě O souřadnicích ![]() a
a ![]() . Pro
. Pro ![]() je
je ![]() (bod O1),
pro
(bod O1),
pro ![]() je
je ![]() (bod O2).
Fázová křivka se tudíž bude skládat z částí kružnic opsaných kolem středů
O1 a O2. Oblast mezi body O1 a O2
představuje tzv. pásmo necitlivosti, fyzikálně charakterizované tím, že
v tomto pásmu je síla pružná menší než síla třecí. To znamená, že
dostane-li se systém do tohoto pásma (zastupující bod bude na čarkované části
fázové křivky), jeho pohyb ustane, aniž by blo dosaženo počátku souřadnic
(stabilního ohniska).
(bod O2).
Fázová křivka se tudíž bude skládat z částí kružnic opsaných kolem středů
O1 a O2. Oblast mezi body O1 a O2
představuje tzv. pásmo necitlivosti, fyzikálně charakterizované tím, že
v tomto pásmu je síla pružná menší než síla třecí. To znamená, že
dostane-li se systém do tohoto pásma (zastupující bod bude na čarkované části
fázové křivky), jeho pohyb ustane, aniž by blo dosaženo počátku souřadnic
(stabilního ohniska).
Příklad A4:
Sestavte tzv. fázový portrét pohybu matematického kyvadla, znázorněného na obr. 4.3.
a) Pohyb v okolí nestabilní rovnovážné polohy
Omezíme-li se na malé kmity kyvadla kolem nestabilní rovnovážné polohy (obr. 4,3a), má pohybová rovnice tvar
![]() (4.19)
(4.19)
kde ![]()
Po dosazení ![]() a
a ![]() , kde
, kde ![]() do (4.19) získáme opět
diferenciální rovnici fázových trajektorií:
do (4.19) získáme opět
diferenciální rovnici fázových trajektorií:
![]() (4.20)
(4.20)
Po integraci této rovnice dostaneme rovnice hyperbol, zaplňujících fázovou rovinu:
![]() , C je
integrační konstanta (4.21)
, C je
integrační konstanta (4.21)
Pro ![]() degeneruje rovnice (4.20)
v soustavu dvou přímek
degeneruje rovnice (4.20)
v soustavu dvou přímek ![]() , které prochází zvláštním bodem
, které prochází zvláštním bodem ![]() . Při
. Při ![]() hyperboly zvláštním
bodem neprocházejí, pouze se asymptoticky přibližují k přímkám
hyperboly zvláštním
bodem neprocházejí, pouze se asymptoticky přibližují k přímkám ![]() , které nazýváme
„separatrixy“. Pohyb po separatrixách je tedy fyzikálně neuskutečnitelný.
Fázová rychlost zastupujícího bodu bude rovna
, které nazýváme
„separatrixy“. Pohyb po separatrixách je tedy fyzikálně neuskutečnitelný.
Fázová rychlost zastupujícího bodu bude rovna ![]() a nulové hodnoty dosáhne pouze ve
zvláštním bodě o souřadnicích
a nulové hodnoty dosáhne pouze ve
zvláštním bodě o souřadnicích ![]() , který se v tomto případě nazývá
„sedlem“ (viz tabulka tab. 2, obr. D). Pohyb systému je v tomto případě
nestabilní.
, který se v tomto případě nazývá
„sedlem“ (viz tabulka tab. 2, obr. D). Pohyb systému je v tomto případě
nestabilní.
b) Pohyb v okolí stabilní rovnovážné polohy
Rovnice matematického kyvadla nyní je
![]() (4.22)
(4.22)
Funkce ![]() a diferenciální rovnice
fázových trajektorií po separaci proměnných je rovna
a diferenciální rovnice
fázových trajektorií po separaci proměnných je rovna
![]()
Po částečné integraci dostaneme:
![]() (4.23)
(4.23)
kde EP je
potenciální energie a C je integrační konstanta. Z rovnic (4.23),
představující zákon zachování mechanické energie lze zjistit, že každé skupině
počátečních podmínek (![]() 0) přísluší jediná hodnota C0,
ale každé jiné hodnotě
0) přísluší jediná hodnota C0,
ale každé jiné hodnotě ![]() odpovídá nekonečně mnoho hodnot x
a y.
odpovídá nekonečně mnoho hodnot x
a y.
Pro model popsaný rovnicí (4.22), přejde rovnice (4.23) po integraci do tvaru
![]() (4.24)
(4.24)
Funkce ![]() má izolovaná minima v bodech
má izolovaná minima v bodech
![]() , viz
, viz
obr. 4.4a. Těmto minimům odpovídají ve fázové rovině (![]() ) stabilní zvláštní body –
středy. Při
) stabilní zvláštní body –
středy. Při ![]() má
funkce EP(φ) izolovaná maxima, kterým odpovídají
nestabilní zvláštní body – sedla. Celkový obraz fázových křivek v rovině (
má
funkce EP(φ) izolovaná maxima, kterým odpovídají
nestabilní zvláštní body – sedla. Celkový obraz fázových křivek v rovině (![]() ) je na obr. 4.4b.
) je na obr. 4.4b.
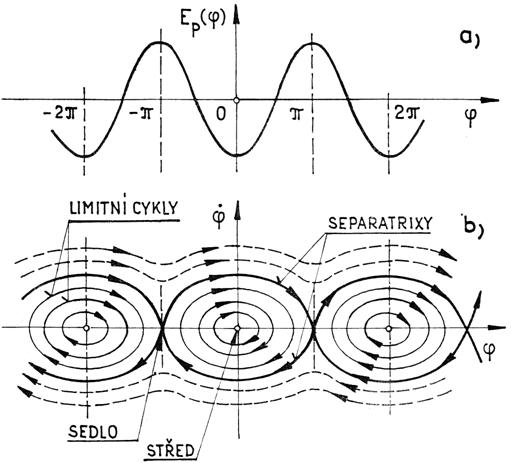
Obr. 4.4
Z rozboru
rovnice (4.24) vyplývají zajímavé důsledky, týkající se možných pohybů modelu (4.21).
Pro ![]() reálný
pohyb neexistuje. Pro hodnoty
reálný
pohyb neexistuje. Pro hodnoty ![]() představují fázové trajektorie
izolované uzavřené křivky, situované kolem stabilních singulárních bodů –
středů, které odpovídají možným periodickým pohybům. Při
představují fázové trajektorie
izolované uzavřené křivky, situované kolem stabilních singulárních bodů –
středů, které odpovídají možným periodickým pohybům. Při ![]() se fázové trajektorie
protínají na ose [φ] v nestabilních singulárních bodech –
sedlech; víme již, že tyto křivky představují separatrixy. Pokud bude
se fázové trajektorie
protínají na ose [φ] v nestabilních singulárních bodech –
sedlech; víme již, že tyto křivky představují separatrixy. Pokud bude ![]() , odpovídá pohyb
zastupujícího bodu po neuzavřených křivkách rotačnímu pohybu kyvadla
v jednom směru.
, odpovídá pohyb
zastupujícího bodu po neuzavřených křivkách rotačnímu pohybu kyvadla
v jednom směru.
U složitějších dynamických modelů, především nelineárních, jsou fázové obrazy mnohem složitější, viz tabulka tab. 3; ovšem základní informace o charakteru pohybu zastupujícího bodu ve fázové rovině zůstávají v platnosti.
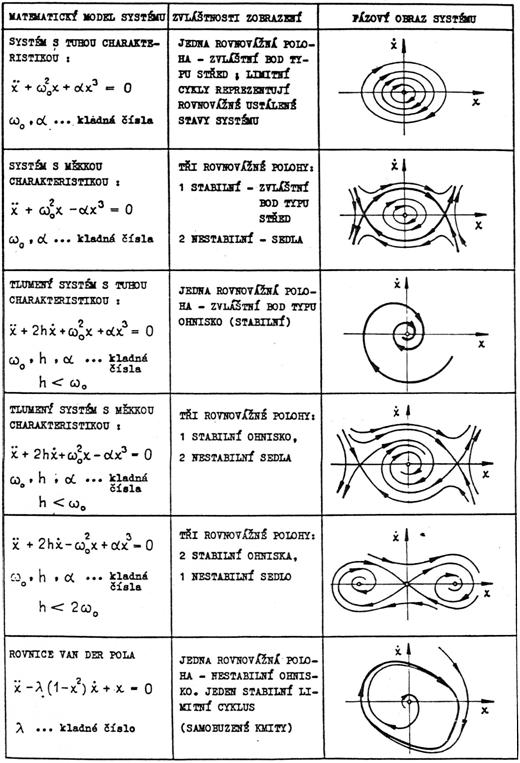
Tabulka 3