1. Lineární dynamické systémy
1.1 Rezonanční charakteristiky lineárních systémů s jedním stupněm volnosti
Závislost amplitudy vynucených kmitů na frekvenci nazýváme amplitudo-frekvenční charakteristikou. Podobně změnu fázového posunutí (u tlumených soustav) na frekvenci nazýváme fázové charakteristiky. Tyto charakteristiky považujeme u mechanických systémů za základní a snadno je odvodíme na základě rozboru odezvy soustavy buzeného harmonickou silou.
Matematickým modelem soustavy je známá rovnice
![]() (1)
(1)
kde m, b a k představují
hmotnost, součinitel viskózního tlumení a součinitel tuhosti. Pro harmonické
buzení ![]() bude
odezva rovněž harmonická.
bude
odezva rovněž harmonická.
![]() (2)
(2)
kde A a y jsou
amplituda a fázové posunutí (zpoždění odezvy na buzení). Po dosazení za sílu ![]() a
a![]() do rovnice (1) a po eliminaci
triviálního řešení dostaneme vztah
do rovnice (1) a po eliminaci
triviálního řešení dostaneme vztah
![]()
ze které již snadno určíme závislost absolutních velikostí amplitudy a fáze na budící frekvenci w, tj. amplitudovou a fázovou frekvenční charakteristiku
 (3)
(3)
Užijeme – li
pojmy: ![]() ,
dynamické zesílení
,
dynamické zesílení ![]() ,
vlastní frekvence
,
vlastní frekvence ![]() ,
frekvenční naladění
,
frekvenční naladění ![]() a poměrný útlum
a poměrný útlum ![]() , přejdou vztahy (3) do
bezrozměrného tvaru:
, přejdou vztahy (3) do
bezrozměrného tvaru:
 ,
,
![]() (4)
(4)
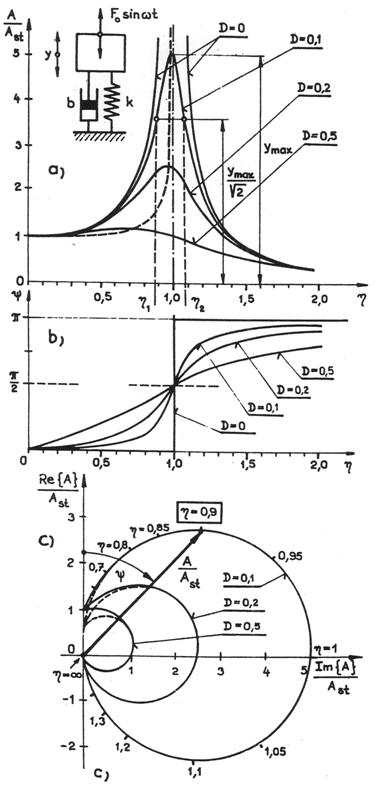
Obr.1.1
Rezonanční
křivky popisují vynucené kmitání všech lineárních tlumených systémů
s jedním stupněm volnosti, lze v bezrozměrných souřadnicích znázornit
jednoparametrickou soustavu křivek (parametr D), které jsou znázorněny
na obr.1.1 (amplitudové rezonanční křivky). Křivky pro ![]() odpovídají rezonančním
charakteristikám netlumené soustavy.
odpovídají rezonančním
charakteristikám netlumené soustavy.
Z rozboru
charakteristik můžeme získat řadu informací. Z prvé rovnice (4) lze snadno
zjistit, že pro ![]() je
je
![]() a
a ![]() pro všechna D.
Ze stejné rovnice lze vypočítat i výšku a polohu rezonanční křivky. Frekvenční
naladění
pro všechna D.
Ze stejné rovnice lze vypočítat i výšku a polohu rezonanční křivky. Frekvenční
naladění ![]() ,
při kterém je amplituda vynucených periodických kmitů maximální je definováno
vztahem
,
při kterém je amplituda vynucených periodických kmitů maximální je definováno
vztahem ![]() .
To znamená, že vrcholy rezonančních amplitudových křivek se z rostoucím
tlumením posouvají k nižším frekvencím, jejich „výška“ se snižuje a pro
.
To znamená, že vrcholy rezonančních amplitudových křivek se z rostoucím
tlumením posouvají k nižším frekvencím, jejich „výška“ se snižuje a pro ![]() přechází rezonanční
křivka do monotónně klesající závislosti s maximem v bodě
přechází rezonanční
křivka do monotónně klesající závislosti s maximem v bodě ![]() (viz. obr.1.1 čárkovaný
průběh).
(viz. obr.1.1 čárkovaný
průběh).
U málo
tlumených soustav naopak leží rezonanční vrchol v blízkosti přímky ![]() , reprezentujíci stav
kdy
, reprezentujíci stav
kdy ![]() .
Z prvé rovnice (4) pak můžeme pro tento stav vypočítat, že
.
Z prvé rovnice (4) pak můžeme pro tento stav vypočítat, že ![]() což je hodnota na
základě které lze z naměřených charakteristik určit odhady D a pak
i součinitele tlumení
což je hodnota na
základě které lze z naměřených charakteristik určit odhady D a pak
i součinitele tlumení ![]() .
.
V technické praxi tyto hodnoty zcela postačují a proto také velikosti maximálních výchylek odhadujeme dostatečně přesně podle vztahu
![]() pro
pro
![]() (5)
(5)
S velikostí
tlumení souvisí také šířka vrcholu rezonanční amplitudové křivky, definovaná
jako rozdíl souřadnic ![]() určených průsečíky rezonanční křivky
s vodorovnou přímkou na úrovni
určených průsečíky rezonanční křivky
s vodorovnou přímkou na úrovni ![]()
Dosadíme-li
opět toto řešení spolu s buzením ![]() do pohybové rovnice, dostaneme po
úpravě soustavu rovnic pro určení reálné a imiaginární složky odezvy:
do pohybové rovnice, dostaneme po
úpravě soustavu rovnic pro určení reálné a imiaginární složky odezvy:
 (8)
(8)
Tuto soustavu převedeme nejprve do tvaru, obsahujícího bezrozměrné parametry η a D:
 (9)
(9)
Nyní provedeme následující úpravy: prvou rovnici soustavy (9) vynásobíme hodnotou Im{A} a odečteme od ní druhou rovnici téže soustavy, vynásobenou Re{A}. Po úpravě dostaneme:
![]() (10)
(10)
Dále budeme
sledovat průběh rozonanční křivky v blízkosti rezonance. Uvážíme-li, že
může dojít k malému „rozladění“ od přesné hodnoty rezonance, můžeme místo
naladění η dosadit do rovnice (10) a do druhé rovnice (9) hodnotu ![]() . Po zanedbání
vyšších mocnin malé hodnoty Δ dostaneme soustavu dvou rovnic, ze kterých
po eliminaci hodnoty Δ dostaneme:
. Po zanedbání
vyšších mocnin malé hodnoty Δ dostaneme soustavu dvou rovnic, ze kterých
po eliminaci hodnoty Δ dostaneme:
![]() (11)
(11)
Rovnice (11)
představuje v rovině, určené souřadnicemi ![]() a
a ![]() kružnici, která prochází počátkem (Re{A}=Im{A}=
0) a má střed v bodě o souřadnicích
kružnici, která prochází počátkem (Re{A}=Im{A}=
0) a má střed v bodě o souřadnicích ![]() a
a ![]() , viz obr. 1.1c. Na tomto obrázku jsou
zakresleny dvě kružnice, pro poměrné útlumy D = 0,1 a D = 0,2.
Plně jsou znázorněny přesné závislosti, získané numerickým řešením soustavy (9).
Je zřejmé, že pouze při nízkých frekvencích buzení jsou odchylky přesných
závislostí od kružnic (čárkované průběhy) patrné. Ovšem tyto diference se
s klesajícími hodnotami tlumení dále zmenšují. Z Kennedy – Pancova
diagramu, nazývaného také kruhovým diagramem je zřejmé, že z něj lze
současně odečítat nejen zesílení
, viz obr. 1.1c. Na tomto obrázku jsou
zakresleny dvě kružnice, pro poměrné útlumy D = 0,1 a D = 0,2.
Plně jsou znázorněny přesné závislosti, získané numerickým řešením soustavy (9).
Je zřejmé, že pouze při nízkých frekvencích buzení jsou odchylky přesných
závislostí od kružnic (čárkované průběhy) patrné. Ovšem tyto diference se
s klesajícími hodnotami tlumení dále zmenšují. Z Kennedy – Pancova
diagramu, nazývaného také kruhovým diagramem je zřejmé, že z něj lze
současně odečítat nejen zesílení ![]() , ale i fázové posunutí ψ
pro dané naladění η. Je zapotřebí si ale uvědomit, že rychlost zde
předbíhá výchylku o
, ale i fázové posunutí ψ
pro dané naladění η. Je zapotřebí si ale uvědomit, že rychlost zde
předbíhá výchylku o ![]() .
.
Z rozboru
frekvenčních diagramů vyplývají, kromě určení vlastní frekvence, zesílení,
případě poměrného útlumu i další významné skutečnosti, kterých lze využít
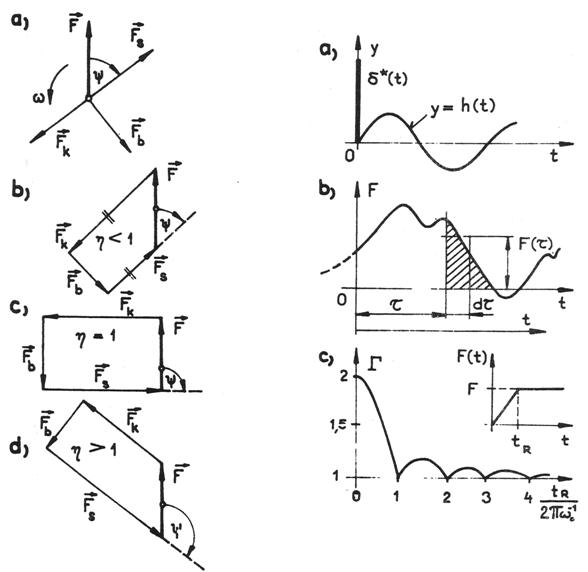
v teorii přístrojů k zajištění rovnovážných stavů apod. Na hmotný bod
totiž působí síly: budící síla F, pružná (vratná) síla ![]() , tlumící síla
, tlumící síla ![]() a setrvačná síla
a setrvačná síla ![]() . Tyto síly působí
ve stejném směru, jen u netlumených systémů; u tlumených systémů je musíme
sledovat Gaussově rovině, viz obr. 1.2a. Všechny tyto síly musí být
v rovnováze a musí tudíž vytvářet uzavřený čtyřúhelník jehož tvar se bude
měnit se změnou ω, resp. se změnou naladění
. Tyto síly působí
ve stejném směru, jen u netlumených systémů; u tlumených systémů je musíme
sledovat Gaussově rovině, viz obr. 1.2a. Všechny tyto síly musí být
v rovnováze a musí tudíž vytvářet uzavřený čtyřúhelník jehož tvar se bude
měnit se změnou ω, resp. se změnou naladění ![]() . Typické tvary tohoto
čtyřúhelníku jsou znázorněny na obrázcích 1.2b,c,d, představujících
podrezonanční (
. Typické tvary tohoto
čtyřúhelníku jsou znázorněny na obrázcích 1.2b,c,d, představujících
podrezonanční (![]() ),
rezonanční (
),
rezonanční (![]() )
a nadrezonanční stav (
)
a nadrezonanční stav (![]() ). Z těchto vektorových obrazců lze
vyvodit následující závěry o vlastnostech kmitajícího systému: při nízkých
kmitočtech (podrezonančních) je budoucí síla zachycována hlavně reakcí pružného
uchycení, zatím co tlumící a setrvačné síly jsou méně významné a způsobují
malé, ale dobře patrné fázové posunutí (obr. 1.2b). S rostoucí frekvencí
se tyto síly zvětšují a roste i úhel ψ, který v rezonoanci
dosáhne hodny
). Z těchto vektorových obrazců lze
vyvodit následující závěry o vlastnostech kmitajícího systému: při nízkých
kmitočtech (podrezonančních) je budoucí síla zachycována hlavně reakcí pružného
uchycení, zatím co tlumící a setrvačné síly jsou méně významné a způsobují
malé, ale dobře patrné fázové posunutí (obr. 1.2b). S rostoucí frekvencí
se tyto síly zvětšují a roste i úhel ψ, který v rezonoanci
dosáhne hodny ![]() .
Z obr. 1.2c je dále patrné, že budící síla je v rovnováze se silou
tlumící a pružná síla je v rovnováze se silou setrvačnou.
V nadrezonanční oblasti (obr. 1.2d) se fázové posunutí dále zvětšuje,
amplituda kmitů klesá (viz obr. 1.1a) a s ní klesá i amplituda pružné
síly. Dosti vysoko nad rezonancí pak přibližně platí
.
Z obr. 1.2c je dále patrné, že budící síla je v rovnováze se silou
tlumící a pružná síla je v rovnováze se silou setrvačnou.
V nadrezonanční oblasti (obr. 1.2d) se fázové posunutí dále zvětšuje,
amplituda kmitů klesá (viz obr. 1.1a) a s ní klesá i amplituda pružné
síly. Dosti vysoko nad rezonancí pak přibližně platí ![]() , tj. vnější síla je zachována
především setrvačností hmoty systémů. Elastické i tlumíci účinky jsou
minimální, úhel se v limitě blíží k hodnotě π.
, tj. vnější síla je zachována
především setrvačností hmoty systémů. Elastické i tlumíci účinky jsou
minimální, úhel se v limitě blíží k hodnotě π.
Obr. 1.2 Obr. 1.3
Tyto vektorové obrazce slouží především k ujasnění fyzikálních poměrů v kmitajícím mechanickém systému. Nejsou ovšem v praxi tak rozšířené jako amplitudové a fázové charakteristiky, kruhové diagramy nebo odezvy na speciální typy budících funkcí, se kterými se seznámíme v následujícím odstavci.
1.2 Odezvy systémů na speciální typy budícíh funkcí
Nejznámější
z těchto odezev je odezva na jednotkový impuls, krátce impulstní funkce.
Uvažujeme systém, který byl v čase ![]() v klidu a kterému je v čase
v klidu a kterému je v čase ![]() udělen jednotkový
silový impuls
udělen jednotkový
silový impuls ![]() ,
kde symbol
,
kde symbol ![]() označuje
známou Diracovu delta – funkci, která je všude nulová s výjimkou bodu
označuje
známou Diracovu delta – funkci, která je všude nulová s výjimkou bodu ![]() , ve kterém platí
, ve kterém platí
![]()
U netlumeného systému lze odezvu na jednotkový impuls vypočítat z podmínky změny hybnosti v elementárním čase:
![]()
Za dobu, pro
kterou silový impuls působil, dojde ke změně rychlosti ![]() a ke změně polohy
a ke změně polohy ![]() (jde o malou
veličinu druhého řádu):
(jde o malou
veličinu druhého řádu):
![]() (16)
(16)
Po pohybovou
rovnici netlumeného systému, zatíženého v čase t impulstní silou ![]()
![]() (17)
(17)
budou počáteční podmínky (s ohledem na to, že systém byl původně v klidu a s vyžitím vztahu (14) tyto:
![]()
Řešení rovnice (17) pak můžeme napsat ve tvaru
![]() (18)
(18)
zde ![]() a funkce
a funkce ![]() představuje
hledanou impulsní funkci. Je-li systém tlumený, bude impulsní funkce rovna
představuje
hledanou impulsní funkci. Je-li systém tlumený, bude impulsní funkce rovna
![]() (19)
(19)
Pomocí
impulsní funkce lze snadno určit odezvu systému na obecnou budící silu F(t),
představíme-li si ji jako množinu elementárních obdelníkových impulsů ![]() , viz obr. 1.3a,b. Za
předpokladu platnosti zákona superpozci platí pro netlumený systém
, viz obr. 1.3a,b. Za
předpokladu platnosti zákona superpozci platí pro netlumený systém
![]() (20)
(20)
a pro tlumený systém
![]() (21)
(21)
Rovnice (20) a (21) platí pro nulové počáteční podmínky.
Tab. 1
Periodické,
harmonické nebo rezonanční kmitání je pouze zvláštním případem obecného pohybu
systému, buzeného silou libovolného průběhu, o čemž se můžeme přesvědčit. Je
známé, že u netlumeného systému, který je v rezonanci, nelze vypočítat
odezvu pomocí vzorců (3). Lze ale použít rovnici (20), do které dosadíme za ![]() ; dostaneme výraz
; dostaneme výraz
který představuje známé rezonanční kmitání, charakterizované amplitudou vzrůstající s časem, které odpovídí fyzikální skutečnosti.
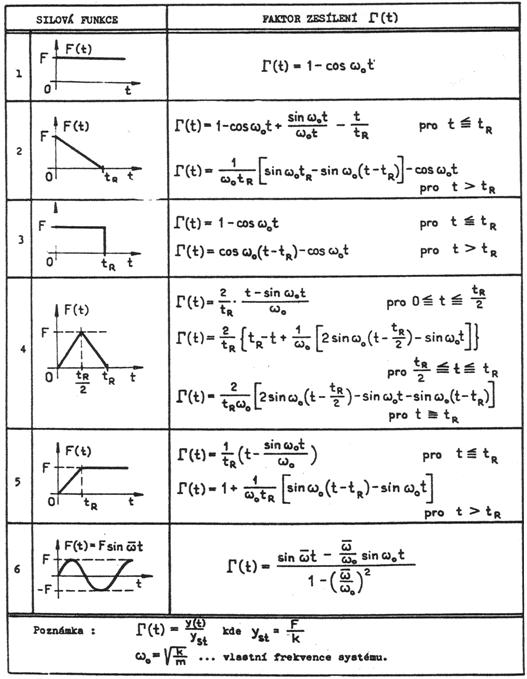
Odezvu netlumeného lineárního systému na konstatní, periodické nebo skokového buzení lze vyjádřit také tím způsobem, že partikulární část odezvy upravíme do tvaru
![]() (22)
(22)
kde funkce Γ
představuje faktor zasílení, formulovaný jako funkce času. Rovnice
charakterizující změnu Γ pro některé často užívané průběhy zatězujících
účinků, jsou uvedeny v tabulce tab. 1. Z těchto vztahů lze jako
extrémy určit i maximální hodnoty ![]() a čas (měřený od počátku působení
impulsní síly), ve kterém je těchto maximálních hodnot dosaženo a to pouze
v závisloti na vlastní frekvenci systému, kterou lze vhodnými zásahy do
struktury systému měnit. Tyto údaje jsou v teorii přístrojů a řídích
systémů velmi důležité, neboť vlastně určují „setrvačnost“, se kterou se přístroj
(soustava) reaguje na daný impuls. Jeden z konkrétních průběhů faktoru
zasílení je znázorněn na obr. 1.3c a je na něm dobře patrné doznívaní odezvy,
vyvolané náhlou změnou budící síly. Skutečnost, že v tomto případě
neuvažujeme tlumení, nemá praktický význam, pokud není extrémně vysoké.
a čas (měřený od počátku působení
impulsní síly), ve kterém je těchto maximálních hodnot dosaženo a to pouze
v závisloti na vlastní frekvenci systému, kterou lze vhodnými zásahy do
struktury systému měnit. Tyto údaje jsou v teorii přístrojů a řídích
systémů velmi důležité, neboť vlastně určují „setrvačnost“, se kterou se přístroj
(soustava) reaguje na daný impuls. Jeden z konkrétních průběhů faktoru
zasílení je znázorněn na obr. 1.3c a je na něm dobře patrné doznívaní odezvy,
vyvolané náhlou změnou budící síly. Skutečnost, že v tomto případě
neuvažujeme tlumení, nemá praktický význam, pokud není extrémně vysoké.
1.3 Přenosová funkce. Konvoluce
Uvažujme dynamický systém popsaný rovnicí (1), který je buzen obecnou spojitou časovou funkcí f(t):
![]() (23)
(23)
Pokud tato rovnice splňuje podmínky Laplaceovy transformace, můžeme vyjádřit obrazy vstupů a výstupů takto:
![]() (24)
(24)
![]() (25)
(25)
Zde symbol (s)
představuje komplexní proměnnou. Pro nulové počáteční podmínky (![]() ) přejde rovnice
(23) do jednoduchého tvaru
) přejde rovnice
(23) do jednoduchého tvaru
![]()
odkud již lze snadno vyjádřit obraz odezvy
![]() (26)
(26)
U reálných
dynamických systémů splňují funkce buzení i odezvy současně také podmínky
kladené na Fourierovu transformaci; můžeme tedy položit ![]() a rovnice (26) přejde do
tvaru:
a rovnice (26) přejde do
tvaru:
![]() (27)
(27)
Kde ![]() je přenosová
funkce systému (23).
je přenosová
funkce systému (23).
Přechod z frekvenční oblasti do oblasti časové lze uskutečnit pomocí inverzní Fourierovy transformace
![]() (28)
(28)
kde h(t) je impulstní funkce, definovaná rovnicí
![]() (29)
(29)
Symbol *, užitý v rovnici (24) představuje tzv. konvoluční součin nebo také Duhamelovy integrály. Aplikujeme-li nyní na rovnici (24) znovu Fourierovou transformaci, dostaneme opět rovnici (23):
![]()
Zavedeme-li
nyní substituci ![]() ,
resp.
,
resp. ![]() ,
dostaneme
,
dostaneme
![]() (30)
(30)
Porovnáme-li
rovnice (28) a (30) lez říci, že konvolace v časové oblasti a naopak (tzv.
konvoluční teorém). Konvoluční integrály se využívají v mnoha inženýrských
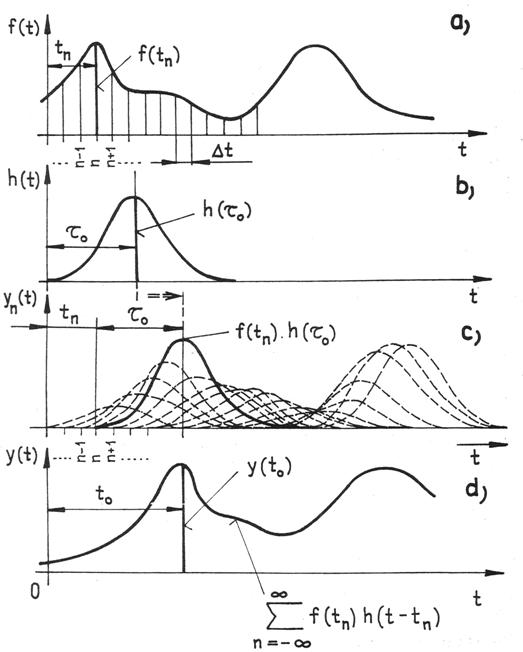
aplikacích a také v teorii náhodných kmitů, jak uvidíme později. Princip
konvoluce je znázorněn na obr. 1.4. Předpokládáme, že každý bod křivky ![]() , můžeme považovat za
impuls v hodnotě rovné hodnotě uvažovaného bodu, například
, můžeme považovat za
impuls v hodnotě rovné hodnotě uvažovaného bodu, například ![]() , viz obr. 1.4a.
Každý takový impuls vybudí odezvu systému (23)
, viz obr. 1.4a.
Každý takový impuls vybudí odezvu systému (23) ![]() , jejíž velikost je úměrná hodnotě
funkce
, jejíž velikost je úměrná hodnotě
funkce ![]() v uvažovaném
okamžiku a jejíž počátek se shoduje s polohou budícího impulsu na časové
ose. Na obr. 1.4c je silně vyznačena odezva, odpovídající impulsu
v uvažovaném
okamžiku a jejíž počátek se shoduje s polohou budícího impulsu na časové
ose. Na obr. 1.4c je silně vyznačena odezva, odpovídající impulsu ![]() . Je patrné, že tato
odezva má počátek v čase tn a špičková hodnota se objeví až v čase
. Je patrné, že tato
odezva má počátek v čase tn a špičková hodnota se objeví až v čase ![]() , kde význam
, kde význam ![]() je patrný
z průběhu 1.4b.
je patrný
z průběhu 1.4b.
Obr. 1.4
Velikost
špičkové hodnoty bude: ![]() a hodnota odezvy v kterémkoliv
jiném čase
a hodnota odezvy v kterémkoliv
jiném čase ![]() bude
definována analogicky:
bude
definována analogicky: ![]() . Celková hodnota odezvy v čase
. Celková hodnota odezvy v čase ![]() pak bude rovna
součtu odezev na buzení počínající v různých časech, lišících se o krok
pak bude rovna
součtu odezev na buzení počínající v různých časech, lišících se o krok ![]() , tj.:
, tj.:
![]()
Nyní již
můžeme vyjádřit celkové hodnoty odezvy v libovolném čase ![]() :
:
![]()
Je zřejmé, že
limitováním této rovnice pro ![]() dojde k rovnici typu (28), což
ilustruje obr. 1.4d.
dojde k rovnici typu (28), což
ilustruje obr. 1.4d.
1.4 Dynamické charakteristiky systémů o n stupnícho volnosti
Reálné mechanické soustavy lze obecně modelovat soustavu simultárních pohybových rovnic. Omezíme-li se na diskretizované modely, můžeme tuto soustavu zapsat ve tvaru maticové rovnice
![]() (32)
(32)
ke M,B,K jsou matice hmotností, tlumení a tuhostí, q(t) je časově proměnný vektor zobecněných výchylek a 0(t) je nulová matice.
K popisu vlastností systémů o více stupních volnosti používáme v podstatě stejných danamických charakteristik jako u systémů s jedním stupněm volnosti. Jsou to: spektra vlastních frekvencí a tvarů vlastních kmitů, matice impulstních funkcí a matice přenosových funkcí.
Spekra
vlastních frekvencí a tvarů vlastních kmitů pro netlumené systémy lze
souhrnně vyjádřit prostřednictvím spektrální matice ![]() a modální matice U:
a modální matice U:
 (33)
(33)
kde ![]() , jsou vlastním frekvence a
sloupce v matici U představují odpovídající vektory.
, jsou vlastním frekvence a
sloupce v matici U představují odpovídající vektory.
Pro tlumené
systémy definujeme rovněž spektra vlastních frekvencí ![]() a tvarů vlastních tlumených
kmitů
a tvarů vlastních tlumených
kmitů ![]() ,
tentokrát jako výsledek řešení tzv. komplexního problému vlastních hodnot
,
tentokrát jako výsledek řešení tzv. komplexního problému vlastních hodnot
![]() (34)
(34)
Pro malá tlumení lze využít s výhodou následujících vztahů:
![]() (35)
(35)
kde ![]() je reálná a
je reálná a ![]() imaginární část komplexního
vlastního čísla
imaginární část komplexního
vlastního čísla ![]() ,
je r-tá vlastní frekvence netlumeného systému a
,
je r-tá vlastní frekvence netlumeného systému a ![]() součinitel poměrného tlumení, příslušný
r-tému tvaru kmitu, vypočtený pomocí vzorce
součinitel poměrného tlumení, příslušný
r-tému tvaru kmitu, vypočtený pomocí vzorce
![]() (36)
(36)
když ![]() je r-tý vlastní vektor,
tj. r-tý sloupec modální matice U. Vlastní vektory tlumeného systému
jsou rovněž komplexní, mají reálné a imaginární části, avšak pro slabě tlumené
systémy platí:
je r-tý vlastní vektor,
tj. r-tý sloupec modální matice U. Vlastní vektory tlumeného systému
jsou rovněž komplexní, mají reálné a imaginární části, avšak pro slabě tlumené
systémy platí:
![]() (37)
(37)
kde ![]() jsou opět r-té sloupce komplexní
modální matice V.
jsou opět r-té sloupce komplexní
modální matice V.
Matice
přenosových funkcí ![]() je definována analogicky
k rovnici (27):
je definována analogicky
k rovnici (27):
![]() (38)
(38)
Při výpočtu matice impulsních
odezvových funkcí ![]() lze
využít skutečnosti, že matice
lze
využít skutečnosti, že matice ![]() a
a ![]() jsou vázány vztahy přímé a zpětné
Fourierovy transformace; tedy:
jsou vázány vztahy přímé a zpětné
Fourierovy transformace; tedy:
![]() (39)
(39)
Známe-li
hodnoty prvků matice ![]() , můžeme vypočítat odezvu systému
o n stupních volnosti na obecnou budíci sílu
, můžeme vypočítat odezvu systému
o n stupních volnosti na obecnou budíci sílu ![]() pomocí rovnice
pomocí rovnice
![]() (40)
(40)
stejně jako její obraz ve frekvenční rovině
![]() (41)
(41)
kde ![]() je vektor
počátečních výchylek a
je vektor
počátečních výchylek a ![]() je Fourierovský obraz budícího vektoru
ve frekvenční oblasti. Stejně lze definovat i konvolutorní součin
v maticové formě
je Fourierovský obraz budícího vektoru
ve frekvenční oblasti. Stejně lze definovat i konvolutorní součin
v maticové formě
![]() (42)
(42)
který je analogický k rovnici (28).
Přenosové a impulstní charakteristiky lze definovat i pro systémy elektrické či elektronické, hydraulické apod.