2. Základy teorie diskrétních dynamických systémů
Obecně jsou úlohy dynamiky strojů popsány parciálními diferenciálními rovnicemi v prostorových souřadnicích a čase. Vhodnou diskretizací prostoru, ať již subjektivní, nebo založenou na metodě konečných prvků, lze danou úlohu převést na systém obyčejných diferenciálních rovnic zapsaných maticově ve tvaru
![]() (2.1)
(2.1)
Zde ![]() je vektor
zobecněných výchylek,
je vektor
zobecněných výchylek, ![]() vektor buzení a
vektor buzení a ![]() vektor všech ostatních sil
působících na mechanickou soustavu. Všechny vektory jsou dimenze m.
Předpokádejme, že lze vektory
vektor všech ostatních sil
působících na mechanickou soustavu. Všechny vektory jsou dimenze m.
Předpokádejme, že lze vektory ![]() dekomponovat na lineární a nelineární
část, totiž na
dekomponovat na lineární a nelineární
část, totiž na
![]() (2.2)
(2.2)
kde
![]() (2.3)
(2.3)
Potom můžeme systém pohybových rovnic (2.1) přepsat do tvaru
![]() (2.4)
(2.4)
kde ![]() , a kde
, a kde ![]() je vektor libovolných silových
účinků, které nelze zahrnout do linearizované levé strany rovnice (2.4), a M,B,K
jsou konstantní reálné čtvercové matice hmotnosti, koeficientů útlumu a
tuhostí, všechny řádu m, kde m je počet stupňů volnosti. Při tom
může vzniknout řada speciálních případů, které postupně probereme.
Z rovnice (2.4) vyplývá, že řešení se hledá pro linearizovaný systém
s korekcí nelinearity (závislé na řešení) v buzení, kde vystupuje
jako aditivní šum.
je vektor libovolných silových
účinků, které nelze zahrnout do linearizované levé strany rovnice (2.4), a M,B,K
jsou konstantní reálné čtvercové matice hmotnosti, koeficientů útlumu a
tuhostí, všechny řádu m, kde m je počet stupňů volnosti. Při tom
může vzniknout řada speciálních případů, které postupně probereme.
Z rovnice (2.4) vyplývá, že řešení se hledá pro linearizovaný systém
s korekcí nelinearity (závislé na řešení) v buzení, kde vystupuje
jako aditivní šum.
2.1 Lineární systémy
Vyznačují se
nulovou nelinearitou, tj. ![]() , v rovnici (2.4). Pro řešení je
účelné převést systém m diferenciálních rovnic 2. řádu na systém 2m
rovnic 1. řádu. Označíme-li
, v rovnici (2.4). Pro řešení je
účelné převést systém m diferenciálních rovnic 2. řádu na systém 2m
rovnic 1. řádu. Označíme-li
 ,
,
dostaneme rozšířením pohybové
rovnice o identitu ![]() rovnici
rovnici
![]() (2.5)
(2.5)
Pronásobíme-li tuto rovnici maticí
 (2.6)
(2.6)
dostanem systém tzv. stavových rovnic
![]() (2.7)
(2.7)
kde
 (2.8)
(2.8)
a kde ![]() je jednotková matice
řádu m.
je jednotková matice
řádu m.
2.2 Volné kmitání
Nepůsobí-li
na soustavu žádné buzení, je ![]() a systému stavových rovnic vyhovuje
řešení
a systému stavových rovnic vyhovuje
řešení ![]() . Po
dosazení do rovnice (2.7) se dostane obyčejný problém vlastních čísel ve tvaru
systému homogenních algebraických rovnic.
. Po
dosazení do rovnice (2.7) se dostane obyčejný problém vlastních čísel ve tvaru
systému homogenních algebraických rovnic.
![]() (2.9)
(2.9)
K tomuto problému existuje ještě problém přidružený
![]() (2.10)
(2.10)
Řešení x
resp. y existují netriviální jen pro určité hodnoty parametru s,
které nazýváme vlastními hodnotami. Jsou to ty hodnoty sk,
pro něž ![]() .
Každé vlastní hodnotě sk přísluší jeden (pravostranný)
vlastní vektor – sloupec xk a jeden (levostranný) vlastní
vektor – sloupec yk. Vlastní hodnota sk,
společná oběma problémům, souvisí se zobecněnou vlastní frekvencí soustavy Ωk
prostřednictvím vztahu
.
Každé vlastní hodnotě sk přísluší jeden (pravostranný)
vlastní vektor – sloupec xk a jeden (levostranný) vlastní
vektor – sloupec yk. Vlastní hodnota sk,
společná oběma problémům, souvisí se zobecněnou vlastní frekvencí soustavy Ωk
prostřednictvím vztahu ![]() , kde i je imaginární jednička.
Vlastní vektory, obecně komplexní, odpovídají vlastním tvarům kmitání. Je-li
studovaný systém jednoduché struktury, pak každému vlastnímu číslu přísluší
jeden nezávislý vlastní vektor.
, kde i je imaginární jednička.
Vlastní vektory, obecně komplexní, odpovídají vlastním tvarům kmitání. Je-li
studovaný systém jednoduché struktury, pak každému vlastnímu číslu přísluší
jeden nezávislý vlastní vektor.
První model problému vlastní hodnoty, vyplývající z rovnice (2.7), lze definovat rozšířenými zápisy rovnic (2.9) a (2.10) pro všechny vlastní čísla ve tvaru
![]() (2.11)
(2.11)
kde ![]() je spektrální matice a
je spektrální matice a ![]() a
a ![]() jsou tzv. modální matice
vytvořené ze všech k = 1,2 ...., m vlastních vektorů – tvarů
kmitů. Vlastní vektory nejsou obecně definovány jednoznačně. Protože by se
mohly navzájem lišit v měřítku, kladou se na ně ještě podmínky ortogonality
a normy, tj. ortonormality
jsou tzv. modální matice
vytvořené ze všech k = 1,2 ...., m vlastních vektorů – tvarů
kmitů. Vlastní vektory nejsou obecně definovány jednoznačně. Protože by se
mohly navzájem lišit v měřítku, kladou se na ně ještě podmínky ortogonality
a normy, tj. ortonormality
![]() (2.12)
(2.12)
Druhý model
je definován homogenní variantou rov. (2.5) vedoucí pro ![]() k zobecněnému problému
vlastních čísel
k zobecněnému problému
vlastních čísel
![]() (2.13)
(2.13)
s podmínkami normy a ortogonality ve tvaru
![]() (2.14)
(2.14)
kde opět U a T jsou
modálními maticemi, které v případě, že ![]() se rovnají X resp. Y. U
obou těchto modelů se pracovalo s maticemi řádu 2m, které však musí
obsahovat redundantní informace, neboť obsahují celkem 2.(2m)2
prvků, zatímco původní model pouze 3m2 prvků v maticích M,
B, K. Proto lze dokázat, že platí
se rovnají X resp. Y. U
obou těchto modelů se pracovalo s maticemi řádu 2m, které však musí
obsahovat redundantní informace, neboť obsahují celkem 2.(2m)2
prvků, zatímco původní model pouze 3m2 prvků v maticích M,
B, K. Proto lze dokázat, že platí
![]() ,
, ![]() (2.15)
(2.15)
Na tomto základě lze postavit i třetí model problému vlastních čísel, tentokrát však kvadratický v s. Pro jeho řešení se vyjde z homogenní úlohy odpovídající problému (2.4) a dostane se pravostranná a levostranná varianta problému vlastní hodnoty ve tvarech
 (2.16)
(2.16)
s novými podmínkami normy a ortonormality, které již nejsou tak průhledné
 (2.17)
(2.17)
Řešení třetího modelu problému vlastních čísel přímou cestou není dobře možné, protože se jedná o maticový kvadratický problém. K řešení lze využít druhého modelu tak, že ze známých matic M, B a K se sestaví matice N a P a vyřeší se matice S a U. Levostranné vektory v matici T se podle formule 2.14 vypočtou inversí matice [NU]. Z modálních matic T a U se pak odseknou dolní poloviny a po normalizaci zůstanou modální matice V a W typu (m, 2m). Ty se oměřítkují např. tak, aby sobě si odpovídající vlastní vektory měly stejné Čebyševovy normy.
2.3 Vynucené kmitání
Vynucené kmity diskrétní lineární mechanické soustavy jsou popsány modelem
![]() (2.18)
(2.18)
V závislosti
na tvaru pravé strany je účelné řešit numerickou úlohu různými postupy.
Ustálené harmonické kmity lze vyšetřovat poměrně snadno. Je-li pravá strana
harmonickou funkcí času ![]() s libovolným komplexním vektorem
amplitud f, má ustálené kmitání podobný tvar, totiž
s libovolným komplexním vektorem
amplitud f, má ustálené kmitání podobný tvar, totiž ![]() . Po dosazení do diferenciální
rovnice dostaneme pro frekvenčně závislou komplexní amplitudu ustálené odezvy
funkci
. Po dosazení do diferenciální
rovnice dostaneme pro frekvenčně závislou komplexní amplitudu ustálené odezvy
funkci
![]() (2.19)
(2.19)
Matice ![]() je maticí komplexních
dynamických poddajností. Říká se jí rovněž matice frekvenčních přenosů nebo
také frekvenčních odezev. Pro každou z budících frekvencí ω
existuje jedna komplexní matice
je maticí komplexních
dynamických poddajností. Říká se jí rovněž matice frekvenčních přenosů nebo
také frekvenčních odezev. Pro každou z budících frekvencí ω
existuje jedna komplexní matice ![]() řádu m.
řádu m.
Obecný
vynucený kmit lineární soustavy se získá poněkud složitějším postupem. Existují
principiálně dva různé způsoby, jak vypočítat odezvu lineárního dynamického
systému na obecné vnější buzení: přímá integrace a konvoluce impulstní odezvy
s buzením. První přístup, použitelný obecně i pro nelineární systémy,
popíšeme až později. Druhý přístup, založený na integrálních transformacích,
využívá skutečnosti, že odezva lineárního systému ![]() na buzení
na buzení ![]() je dána konvolučním integrálem
je dána konvolučním integrálem
![]() (2.20)
(2.20)
Pokud všechny funkce vstupující do integrálu jsou absolutně integrabilní, lze na rovnici (2.20) aplikovat Fourierovu transformaci (FT) a dostat tak známý tvar obrazu konvoluce jakou součinu obrazů funkcí vstupujících do konvolute
![]() (2.21)
(2.21)
Zpětnou FT ![]() se získá odezva
se získá odezva ![]() . Při numerické
realizaci celého postupu pomocí konečné diskrétní FT (její rychlé verze FFT),
je zapotřebí pracovat s časovými řadami
. Při numerické
realizaci celého postupu pomocí konečné diskrétní FT (její rychlé verze FFT),
je zapotřebí pracovat s časovými řadami ![]() a
a ![]() doplněnými o stejně dlouhé nulové
úseky. Za těchto okolností není výsledek zatížen cyklickou chybou vznikající
v důsledku diskretizace.
doplněnými o stejně dlouhé nulové
úseky. Za těchto okolností není výsledek zatížen cyklickou chybou vznikající
v důsledku diskretizace.
Za jistých předpokladů lze hledat řešení vynuceného kmitání diskrétních lineárních systémů analyticky s použitím maticové exponenciály.
2.4 Stabilita
Z polohy vlastních čísel v komplexní rovině lze usuzovat i na chování dynamického systému. Rozviňme vztah popisující volné kmity v čase
![]() (2.22)
(2.22)
Zde x
je vektor komplexních amplitud (vlastních tvarů kmitů), ![]() je člen vyjadřující
proměnnost těchto amplitud v čase a
je člen vyjadřující
proměnnost těchto amplitud v čase a
![]() (2.23)
(2.23)
je stacionární kmitavý člen. Je tedy zřejmé, že vlastní kmity budou omezené, pokud reálná část libovolného vlastního čísla bude nekladná. Může nastat pět případů polohy vlastního čísla v komplexní rovině (viz tabulku 2.1 a obrázek 2.1)
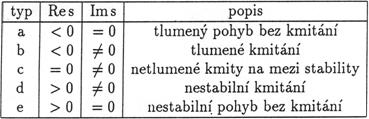
Tabulka 2.1: Přehled typů vlastních čísel
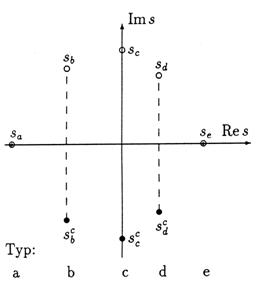
Obr. 2.1: Rozmístění vlastních čísel v Gaussově rovině určuje chování dynamického systému.
Pohyby
systémů s ![]() (v levé polorovině) jsou stabilní. Vlastní čísla typů b, c, d se vždy vyskytují
v komplexně sdružených párech, pokud matice M, B, K jsou
reálné. Pro kmitavý systém s jedním stupněm volnosti lze relativní útlum
k-tého vlastního čísla stanovit z formule
(v levé polorovině) jsou stabilní. Vlastní čísla typů b, c, d se vždy vyskytují
v komplexně sdružených párech, pokud matice M, B, K jsou
reálné. Pro kmitavý systém s jedním stupněm volnosti lze relativní útlum
k-tého vlastního čísla stanovit z formule
![]() (2.24)
(2.24)
Pro systémy s více stupni volnosti platí tento vztah jen přibližně.
Pro vlastní čísla v levé polorovině budou kmity příslušné frekvence zanikat, kdežto v pravé polorovině budou růst. Pro vlastní čísla na imaginární ose se systém bude chovat jako netlumený. Mechanické diskrétní systémy vytvářené z hmotností, pružin a tlumičů mají matice M a K symetrické a matici B hermitovskou, tj. v reálné části symetrickou a v imaginární antisymetrickou s nulovou diagonálou. U takových systémů se pak setkáváme pouze s vlastními čísly typu a, b, c, tedy bez nestabilit. Připojí-li se však k těmto systémům další účinky, obvykle nevratného charakteru, jako jsou vlivy proudícího média, řezného procesu při obrábění, styku kola s kolejnicí anebo řízení, porušující symetrii původních matic, mohou se vyskytnout i případy typu d, e.
Vlivy porušující symetrii se obvykle mění s některým provozním parametrem (rychlostí proudění, jízdy, řezného procesu, tlakem, teplotou ap.). V souvislosti s tím se mění i poloha vlastních čísel v Gaussově rovině a vlastní číslo původně typu b může pro určitý provoz přejít na typ c až dokonce do režimu d. Tehdy energie odebíraná z pohonu stroje je přes nesymetrické členy matic přiváděna do kmitajícího systému a v okamžiku, kdy se právě rovná energii odváděné tlumícími elementy, nastane stav na mezi stability. Po překročení meze stability přebytek přivedené energie buď rozkmitává lineární soustavu nade všechny meze, nebo ji přivede ke zhroucení (u typu e). Systémy, jejichž vlastní hodnoty se v průběhu změn provozních parametrů mění, se nazývají evolutivními.